CN100558306C - 基于冲洗流控制外科系统的系统 - Google Patents
基于冲洗流控制外科系统的系统 Download PDFInfo
- Publication number
- CN100558306C CN100558306C CNB2005800092905A CN200580009290A CN100558306C CN 100558306 C CN100558306 C CN 100558306C CN B2005800092905 A CNB2005800092905 A CN B2005800092905A CN 200580009290 A CN200580009290 A CN 200580009290A CN 100558306 C CN100558306 C CN 100558306C
- Authority
- CN
- China
- Prior art keywords
- obstruction
- rate
- flushing pressure
- stage
- aspiration vacuum
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F9/00—Methods or devices for treatment of the eyes; Devices for putting-in contact lenses; Devices to correct squinting; Apparatus to guide the blind; Protective devices for the eyes, carried on the body or in the hand
- A61F9/007—Methods or devices for eye surgery
- A61F9/00736—Instruments for removal of intra-ocular material or intra-ocular injection, e.g. cataract instruments
- A61F9/00745—Instruments for removal of intra-ocular material or intra-ocular injection, e.g. cataract instruments using mechanical vibrations, e.g. ultrasonic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M3/00—Medical syringes, e.g. enemata; Irrigators
- A61M3/02—Enemata; Irrigators
- A61M3/0204—Physical characteristics of the irrigation fluid, e.g. conductivity or turbidity
- A61M3/0216—Pressure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M3/00—Medical syringes, e.g. enemata; Irrigators
- A61M3/02—Enemata; Irrigators
- A61M3/0204—Physical characteristics of the irrigation fluid, e.g. conductivity or turbidity
- A61M3/022—Volume; Flow rate
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M3/00—Medical syringes, e.g. enemata; Irrigators
- A61M3/02—Enemata; Irrigators
- A61M3/0233—Enemata; Irrigators characterised by liquid supply means, e.g. from pressurised reservoirs
- A61M3/0254—Enemata; Irrigators characterised by liquid supply means, e.g. from pressurised reservoirs the liquid being pumped
- A61M3/0258—Enemata; Irrigators characterised by liquid supply means, e.g. from pressurised reservoirs the liquid being pumped by means of electric pumps
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00973—Surgical instruments, devices or methods, e.g. tourniquets pedal-operated
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M1/00—Suction or pumping devices for medical purposes; Devices for carrying-off, for treatment of, or for carrying-over, body-liquids; Drainage systems
- A61M1/71—Suction drainage systems
- A61M1/77—Suction-irrigation systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/33—Controlling, regulating or measuring
- A61M2205/3368—Temperature
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/50—General characteristics of the apparatus with microprocessors or computers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M3/00—Medical syringes, e.g. enemata; Irrigators
- A61M3/02—Enemata; Irrigators
- A61M3/0202—Enemata; Irrigators with electronic control means or interfaces
Abstract
能检测堵塞开始或其他外科事件以及堵塞解除时刻的外科系统。为帮助避免冲头过热,系统使用冲洗流率确定眼睛的温度,以及如果预测过热情形,自动地降低机头的电力。代替地或另外,系统监视由机头耗费的电力,其表示冲头上的切割负载,以及自动地调整冲头的电力或冲程以便补偿冲头上增加的负载。
Description
相关申请的交叉引用
本申请是2004年4月5日提交的共同未决美国专利申请序号10/818,314的部分继续申请,在35U.S.C.§120下要求其优先权,该共同未决美国专利申请在35U.S.C.§119下,要求2004年3月22日提交的美国临时申请序号60/552,240的优先权。本申请还在35U.S.C.§119下,要求2004年7月14日提交的、U.S.临时申请序号60/587,693的优先权。
技术领域
本申请一般涉及眼科手术领域,以及更具体地说,涉及基于包含冲洗压力的确定结果,控制晶状体乳化系统的外科参数的方法。
背景技术
人眼用来通过称为角膜的清澈外部分透射光,以及通过晶状体,将图像聚焦在视网膜上,提供视力。聚焦图像的质量由许多因素,包括眼睛的大小和形状,以及角膜和晶状体的透明度而定。当年龄或疾病导致晶状体变得不太透明时,由于能透射到视网膜的光减少,导致视力降低。这种缺陷医学上称为白内障。用于白内障的可接受的治疗是手术去除白内障以及将晶状体替换为人造晶状体(IOL)。在美国,使用称为晶状体乳化法的外科技术,去除大多数白内障晶状体。在该过程期间,将薄的切割冲头插入患病的晶状体中并超声波振动。振动切割冲头液化或乳化晶状体以便使晶状体吸出眼睛。患病的晶状体一旦移出,由IOL替代。
适合于眼科过程的典型的超声波外科设备包括超声波驱动的机头、附加的切割冲头、冲洗套管以及电控台。机头组件通过电缆或连接器以及柔性管连接到控制台。外科医生通过按压踏板请求达到在控制台上设定的电力的最大量的电力,在任何指定时间控制输送到机头的切割冲头并施加在组织上的超声电量。柔性管通过机头组件输送冲洗流体并从眼睛汲取抽吸流体。
机头的操作部是连接到压电晶体组的中央定位的、空的谐振棒或操作杆。晶体受操作台控制并在晶状体乳化期间,输送驱动操作杆和所附切割冲头的超声振动。通过柔性固定件,在机头的空体或外壳内悬挂晶体/操作杆组件。机头体端接在本体的远端处的缩小直径部或锥头中。外部拧上锥头以便容纳冲洗套管。同样地,在其远端内部地拧上操作杆膛以便容纳切割冲头的外部螺纹。冲洗套管还具有拧在锥头的外螺纹上的内螺纹膛。调整切割冲头以便冲头仅凸出冲洗套管的开口端预定量。
在使用中,切割冲头和冲洗套管的末端插入到角膜、巩膜或其他位置中的预定宽度的小切口中。通过晶体驱动的超声操作杆,在冲洗套管内,沿其纵向轴超声振动一种已知的切割冲头,从而就地乳化所选组织。切割冲头的空膛与操作杆中的膛连通,操作杆中的膛又与从机头到操作台的抽吸管道连通。其他适当的切割冲头包括产生纵向和扭转振荡的压电元件。这种切割冲头的一个例子在美国专利号6,402,769(Boukhny)中描述过,其内容在此引入以供参考。
操作台中的降低的压力或真空源通过切割冲头的开口端、切割冲头和操作杆膛以及抽吸管道,将乳化组织从眼睛汲取或抽吸到收集设备中。通过冲洗套管的内表面和切割冲头间的小的环形隙,注入手术位置中的盐溶液或其他冲洗剂,帮助抽吸乳化组织。
一种已知的外科技术是尽可以少地使切口进入眼睛的前房以便降低诱发散光的风险。这些小的切口导致将冲洗套管与振动冲头紧紧地挤压的非常绷紧的伤口。冲洗套管和振动冲头间的摩擦产生热。通过流入冲头内的抽吸流体的冷却效果,降低冲头过热和烧伤组织的风险。
当冲头由于乳化组织变得阻塞或堵塞时,会降低或消除抽吸流,使冲头加热,从而降低冷却以及导致温度增加,这可能会烧伤切口处的组织。另外,在阻塞期间,更大真空能在抽吸管中形成以致当切口最终破裂时,能从眼睛快速地抽吸更多流体,可能导致眼球塌陷或眼睛的其他损坏。
已知设备已经使用检测抽吸真空的大的增加,以及基于特定预定真空级,检测堵塞的传感器。基于该检测堵塞,可以降低机头的电力和/或能增加冲洗或抽吸流。见U.S.专利序号5,591,127,5,700,240和5,766,146(Barwick,Jr.等人),其全部内容在此引入以供参考。然而,这些设备使用固定的抽吸真空级来触发系统响应。该固定级是基于被选真空上限的固定百分比的阈值。然而,由于它们直到达到预定真空级时才响应,限制这些系统的使用和效率。Boukhny等人的美国专利6,179,808描述了当温度超出基于测量或估计的冲洗流计算出的预定极限时,降低信号振幅和/或占空比的系统,其全部内容在此引入以供参考。
由于实际上,在不同堵塞阶段期间,真空级会在短的时间周期中改变,由此能改进已知堵塞检测系统。将该预定真空极限设置太低导致系统过早改变其操作参数,以及在消除堵塞后,保持那些参数。将极限设置太高会导致系统将其设定值改变成太接近堵塞的实际具体值,以及在清除堵塞前,将其设定值改变回额定值。另外,当堵塞切割冲头时,最大化切割效率,因此当检测到堵塞状况时增加电力最大化切割效率,但增加使冲头周围的组织过热的风险。
另外,在整个手术中,有时冲头压向晶状体以便乳化晶状体组织,以及有时冲头不与晶状体接触。然而,超声能量仍然存在直到外科医生释放踏板为止,即使在当抽吸晶状体物质,外科医生使冲头拉离晶状体,或晶状体移离冲头时也是这样。手术效率降低,以及浪费的能量会导致冲头的不必要加热,这可能增加不期望地烧伤切口处的组织的可能性。
因此,仍然需要存在一种堵塞检测系统,能更精确地检测外科抽吸系统中堵塞的出现和清除。能由控制系统使用该信息来相应地调整电力,例如在堵塞期间增加电力以便改进超声冲头的切割效率和/或当相对温度达到预定阈值时,降低电力以便防止过分加热。通过增加检测冲头何时不再与晶状体物质接触以及自动地调整电力的负载检测系统,能进一步增加切割效率。
发明内容
根据一个实施例,一种通过建立阈值温度和监视延伸到超声机头的冲洗管道中的冲洗压力,控制外科系统的方法。计算冲洗流体的流率和用于冲洗流体流的吸热量。通过为了确定眼睛的温度比较或分析吸热量和提供给超声机头的电力,来确定眼睛的温度,将其与阈值温度比较。基于比较,根据需要调整输送到超声机头的切割冲头的电量。
根据另一实施例,建立阈值温度以及监视超声机头的冲洗压力。计算冲洗流体流率以及确定用于冲洗流体流率的吸热量。基于吸热量和提供给超声机头的电力,确定眼睛的温度。将眼睛温度与阈值温度进行比较。另外,确定冲洗压力的变化率,以及基于变化率,确定堵塞级。基于堵塞级和比较,根据需要调整输送到超声机头的切割冲头的电力。
在另一实施例中,控制外科系统的方法包括建立阈值温度,监视冲洗压力和计算冲洗流体的流率,基于用于所计算的冲洗流体流率的吸热量和提供给超声机头的电力,确定眼睛的温度。将眼睛温度与阈值温度进行比较。另外,确定冲洗压力的变化率。基于变化率,确定堵塞级,以及基于堵塞级和比较,根据需要调整输送到超声机头的切割冲头的电力。例如,如果所确定的温度超出阈值温度,能降低输送到机头的电力,而如果确定温度低于阈值温度,能保持或增加电力。
根据各个实施例,通过调整占空比或调整超声机头的机头输出的冲程或振幅,能调整电力。能识别的堵塞级包括堵塞的开始或初步指征、堵塞前期情形、完全堵塞、堵塞解除或从堵塞解除恢复。
附图说明
现在参考附图,其中,相同的参考标记表示相应的部件,其中:
图1是可以由各个实施例使用的示例性外科系统的立体图;
图2是表示外科系统的部件的框图;
图3A-B示例说明由各个实施例使用的示例性超声机头;
图4是示例说明基于模型和一个或多个操作参数的变化率,调整输送到机头的电力的方法的一个实施例的流程图;
图5示例说明能由本发明的实施例使用的堵塞级;
图6示例说明在图5所示的不同堵塞级,抽吸真空和冲洗压力图;
图7是示例说明用于调整电力以便防止传感器冲头过热的方法的一个实施例的流程图;
图8是图7所示的实施例的一种实现的更详细流程图;
图9a-9b示例说明具有恒定振幅和不同断开时间的示例突发模式脉冲,由踏板的下压控制不同断开时间;
图10示例说明具有不同占空比的示例性脉冲模式脉冲,占空比受踏板下压控制;
图11示例说明根据一个实施例的切割脉冲间的非零检测电力级;
图12是示例说明基于电力、阈值和灵敏度计算,调整电力的方法的流程图;
图13是可以由一个实施例使用的机头电源系统的示意图;
图14示例说明根据另一实施例,具有短于图11所示的检测电力级持续时间的持续时间的非零检测电力级;
图15示例说明根据另一实施例,切割级间的具有随时间改变的持续时间的非零检测电力级;
图16示例说明根据另一实施例,切割脉冲间的单独的非零检测电力脉冲,以及在切割和检测电力脉冲间的为零的电力;
图17根据另一实施例,示例说明切割脉冲间的单独的检测电力脉冲,以及比在图16中所示的检测电力脉冲的持续时间更短的检测电力脉冲的持续时间;
图18根据另一实施例,示例说明具有随时间改变的持续时间的单独的非零检测电力脉冲;
图19根据另一实施例,示例说明正好在切割脉冲前的非零检测电力脉冲;
图20根据另一实施例,示例说明正好在切割脉冲后的非零检测电力脉冲;
图21根据另一实施例,示例说明切割脉冲间的单独的检测电力脉冲和基于衰减的检测电力脉冲所进行的检测电力测量;
图22示例说明相对于更慢衰减检测电力脉冲所进行的测量;
图23示例说明相对于更快衰减检测电力脉冲所进行的测量;以及
图24根据另一实施例,示例说明在切割脉冲从高电平转变到低电平后,相对于切割脉冲的衰减率所进行的检测测量。
具体实施方式
本说明书描述用于控制用在例如晶状体乳化手术中的外科系统的方法的实施例。实施例提供能通过检测抽吸系统、冲洗系统或其组合的压力级的变化,检测外科事件(诸如堵塞)的阶段,例如在堵塞开始、堵塞前期情形、完全堵塞,以及何时堵塞解除的外科系统。通过监视抽吸或冲洗压力级如何改变,能精确地检测堵塞的开始和结束。只要检测到堵塞,能编程外科系统来通过增加冲头的冲程或通过增加脉冲超声电力的占空比,增加可用于机头的电力。
为帮助避免冲头过热,外科系统监视冲洗流率以及如果预测过热情形,自动地降低到机头的电力。代替地,或者另外,能监视由机头汲取的电量,其表示冲头上的切削负载。能使用该信息来自动地调整冲头的电力或冲程(位移)以便补偿冲头上的负载变化。在下述描述中,参考附图,附图通过示例,但不是限制,表示能利用的具体实施例。
通过适当的硬件或软件控制,能在商业上可获得的外科系统或控制台上实现实施例。在图1中总体上示例说明一个适当的系统100以及其表示可从Alcon Laboratories,Inc.,6201South Freeway,Q-148,Fort Worth,Texas 76134获得的 视觉系统。
视觉系统。
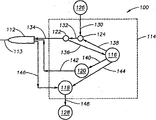
图2进一步详细地示例说明一个示例性控制系统100。控制系统100用来操作超声机头112以及包括控制台114,该控制台包括控制模块或CPU116,抽吸、真空或蠕动泵118,机头电源120,冲洗压力传感器122和阀124。控制台114可以是商业上可获得的外科控制台,诸如外科系统,也可以从Alcon Laboratories,Inc.获得。
能利用各种超声机头112和切割冲头,包括但不限于在美国专利序号3,589,363;4,223,676;4,246,902;4,493,694;4,515,583;4,589,415;4,609,368;4,869,715;4,922,902;4,989,583;5,154,694和5,359,996中所述的机头和冲头,其全部内容在此引入以供参考。为说明目的,在图3A-B中示出了示例性机头,但不是限制。
再参考图2,CPU116可以是任何适当的微处理器、微控制器、计算机或数字逻辑控制器。泵118可以是蠕动、隔板、文杜里管或其他适当的泵。电源120可以是任何适当的超声驱动器,诸如集成在 外科系统中,也可以从Alcon Laboratories,Inc.获得。阀124可以是任何适当的阀,诸如螺线管激活的夹管阀。可以通过可以作为在瓶或袋中提供的任何商业上可获得的冲洗溶液的盐源126,提供冲洗流体,诸如盐的注入。
外科系统中,也可以从Alcon Laboratories,Inc.获得。阀124可以是任何适当的阀,诸如螺线管激活的夹管阀。可以通过可以作为在瓶或袋中提供的任何商业上可获得的冲洗溶液的盐源126,提供冲洗流体,诸如盐的注入。
使用中,冲洗压力传感器122通过冲洗管线130,132和134,连接到机头112以及注入流体源126。冲洗压力传感器122测量从源126至机头112的冲洗流体的压力,以及通过电缆136,将该信息传送到CPU116。可以由CPU116使用冲洗流体压力数据,使用软件命令,控制该控制台114的操作参数。例如,CPU116可以通过电缆140,改变通过电力电缆142发送到机头112和冲头113的电源120的输出。CPU116也可以使用由冲洗压力传感器122提供的数据来通过电缆144,改变泵118的操作。泵118通过管线146,从机头112抽吸流体,并通过管线148,注入收集容器128中。CPU116也可以使用由冲洗压力传感器122提供的数据和电源120的应用输出以便将可听音提供给用户。能在美国专利序号6,179,808(Boukhny等人)和6,261,283(Morgan等人)中找到有关这些外科系统的另外的细节,其全部内容在此引入以供参考。
在一个实施例中,控制台114能基于堵塞事件的阶段,控制输送到机头112的电量。更具体地说,基于抽吸真空级、冲洗压力级,或抽吸真空和冲洗压力级两者的变化,进行电力调整。变化能是例如抽吸真空和/或冲洗压力的增加或减少的变化率。
如图4所示,能进行输送到机头的电量的调整。初始地,在步骤400,在一定时间周期上,检测在堵塞或其他外科事件期间,外科操作参数图。操作参数能是真空压力和/或冲洗压力。也能检测两种压力,然而,为说明目的而不是限制,主要参考一种操作参数。在步骤410,能确定或计算操作参数的值和/或变化率。基于该计算,确定堵塞程度。在步骤430,基于堵塞阶段,根据需要,能调整输送到机头112的切割冲头的电量。
更具体地说,在堵塞前、期间和后,已经确定抽吸真空和冲洗压力级遵循可检测图。能使用该图来识别堵塞程度以及相应地调整输送到机头112的电力。
如图5所示,典型的堵塞事件具有下述阶段:堵塞开始500、堵塞前期510、完全堵塞520、堵塞解除530和恢复540。术语“开始”通常用来指堵塞的刚刚开始或初始阶段,以及“堵塞前期”通常用来指在堵塞开始后以及完全堵塞前的时间。换句话说,“开始”通常用来指堵塞的发展的开始,以及“堵塞前期”通常用来指堵塞正转变为完全堵塞的阶段。
图6更详细地示例说明被检测的抽吸真空和冲洗压力的图。对每一阶段,在时间(t)上,抽吸真空表示为(mmHg),以及在相同时间(t)上,冲洗流体或盐的压力表示为(cmH2O)。这些阶段在下文更详细地描述。
如图6所示,堵塞开始事件或情形500特征在于从真空或冲洗压力相对稳定或恒定的无堵塞状态(600和605)抽吸真空快速增加610以及冲洗压力快速增加615。换句话说,真空和冲洗压力增加的速率>0。如所示,通过增加抽吸真空和冲洗压力,标识开始500。然后,冲洗压力可能稍微减小(617)以及稳定(618),然而,抽吸真空级初始地增加,以及当冲洗压力保持稳定时持续增加。
在堵塞开始事件500后,堵塞发展或转变为堵塞前期事件或情形510。如图6所示,堵塞前期事件510的特征在于抽吸真空的增加率的减缓620,以及相对稳定的冲洗压力625。因此,抽吸真空和冲洗压力的增加率逐步地减小到零。换句话说,真空和冲洗压力变得相对稳定。
堵塞前期情形510转变为完全堵塞520。完全堵塞的特征在于最大极限630。另外,冲洗压力稳定635。
在完全堵塞520后,堵塞解除530。堵塞解除事件530的特征在于抽吸真空640和冲洗压力645的快速减小。如图6所示,在堵塞解除后,抽吸真空和冲洗压力级快速地减小(分别速率为<0)。在快速减小后,抽吸真空和冲洗压力级的下降率减小642,而冲洗级压力可能相反地短暂上升647,然后稳定648。
在堵塞解除520后为堵塞恢复阶段530。恢复阶段530的特征在于抽吸真空650和冲洗压力655的减小率的持续减缓,最终达到基本上恒定的水平。换句话说,真空和冲洗压力的下降率从负值逐渐地增加到接近0。
基于所测试的外科系统,图6所示的真空和冲洗压力图从一个外科系统到另一外科系统是兼容的,以及能使用各种已知的数字信号处理方法检测。在一个实施例中,使用相关方法,检测真空和冲洗压力。例如,通过计算预定图和来自外科系统的实际抽吸真空或冲洗压力传感器读数间的线性关联,能检测堵塞的阶段。定义堵塞开始的抽吸真空的预定图可以是例如四点相同真空读数后面跟着12点线性增加真空读数。
例如,两个序列xi和yi间的线性关联是经线性变换,能将一个序列如何接近地变换成另一个序列的度量:
yi=axi+b
其中:a=线性相关系数,b=偏差。
假定两个序列,线性相关R计算如下:
其中:N-相关长度(即序列中点的数量)
线性相关系数计算如下:
根据一个实施例的方法包含计算在使用外科系统期间收集的抽吸真空和/或冲洗压力传感器读数的样本序列和表示所述堵塞事件的预定图间的线性关联。所计算的关联值反映样本序列和预定图间的类似性,最高可能值1.0表示绝对匹配。表示足够关联的值的范围优选在0.8和0.99间。
只要确定匹配或可接受关联,一些外科事件,诸如堵塞前期和堵塞恢复的可信度为高,以及能根据需要调整系统的外科参数。
对诸如堵塞开始和堵塞解除的事件,应当基于测试值的变化率,限定图匹配。使用反映测试序列和预定图的斜率的线性相关系数,能估计真空和冲洗压力的变化率,该变化率由此能用来估计样本序列是否具有用于特定事件的足够变化率。
在一个实施例中,变化率是导数(ΔValue/ΔTime),或在某段时间上的值的变化的直接计算。以不同设定值(例如不同抽吸泵率),对指定系统,能经验地建立用于足够率的标准。
对要求对图匹配和变化率限定的情形,当满足两个条件时,视为检测到堵塞事件。只要检测到堵塞事件,能调整系统的外科参数。能应用所述方法来检测堵塞序列中的所有事件(堵塞开始、堵塞前期、堵塞、堵塞解除以及恢复)。通过检测抽吸真空和/或冲洗压力级的图,能精确地确定何时应当调整电力的定时。因此,实施例能比依赖于识别完全堵塞的阈值或预先确定的抽吸真空级的已知系统更精确。
在另一实施例中,使用卷积而不是关联来完成图的匹配。因此,本领域的普通技术人员将意识到在此所述的关联、导数和卷积技术仅是示例性例子,以及不打算限定。
在另一实施例中,能调节输送到机头的电量以便防止冲头113过热,其会导致损坏眼睛组织。该实施例称为Thermal WatchTM以及总体上在图7中示例说明。
在步骤700中,建立阈值温度。在步骤710,监视冲洗流体126的源,诸如盐的压力。在步骤720,计算或确定来自被监视的冲洗流体源126的冲洗流体的流率。在步骤730中确定吸热的冲洗流体的流量或冲洗流体的吸热量。在步骤740,分析或比较输送到机头112的所确定的吸热量和电力。基于该比较或分析,在步骤750中确定眼睛或其他组织的温度。
例如,通过在离散的时间步骤执行温度计算可计算出眼睛的近似温度,在离散的时间步骤中,通过将在前温度估计乘以冷却系数(<1),然后加上在该时间间隔期间输送的电力乘以电力系数的结果以及减去该时间间隔期间的流量乘以流量系数的结果,找到不同时间的估计温度。
在步骤760,比较所估计的眼睛温度和阈值温度。基于所估计的温度是否超出阈值或超出该阈值预定量,在步骤770,根据需要,调整输送到超声机头112的切割冲头113的电量。例如,如果所估计的温度超出阈值,通过降低超声信号的振幅和/或减小超声信号的占空比,可以降低输送到机头的电力,而如果所估计的温度低于阈值,可以维持或增加电力。
图8示例说明图7所示的过程的一种实现。参考图8,在步骤800,确定是否允许Thermal WatchTM特性。如果不允许Thermal WatchTM,那么,在步骤805,系统使用线性超声控制功能操作。换句话说,由控制台设定值和外科医生下压踏板,控制所输送的超声电力。
如果允许Thermal WatchTM,那么,在步骤810,由系统记录或读取由外科医生设定的阈值。阈值可以无单位及可以是从“关”到“最大值”之间的任意数量的阶。
在步骤815中,系统监视冲洗流体的压力(“IPS读数”)和/或步骤820中冲洗流体源瓶126的高度。在步骤825中,这些冲洗流体压力参数表示冲洗流体的流率,即在某段时间上冲洗流体的数量。已知冲洗流体流率,能近似用于冲洗流体流率的热淬火量(步骤830)。时间的流量函数F(t)能近似射流管线上压降的线性函数:F(t)=R(P0-P(t)),其中,P0是冲洗源压力(例如冲洗瓶高),P(t)是冲洗压力传感器读数,以及R是压力源和冲洗压力传感器间的射流管线电阻。对指定射流(即一次性)结构,经验地确定电阻R。上述近似产生用于稳定状态流量状况的精确结果。为提高用于瞬时响应的估计精度,能将指数衰减校正加到上述等式,如下:
其中,δ是瞬变系数,以及τ0是近似射流管线的时间常数。对指定射流(即一次性结构),经验地建立两个值。对可消耗的Alcon 系统一次性所建立的样本值为:δ=0.3,τ0=1.3秒。上述等式能容易地转换成允许方法的具体实现的离散形式。
系统一次性所建立的样本值为:δ=0.3,τ0=1.3秒。上述等式能容易地转换成允许方法的具体实现的离散形式。
在步骤835中,还监视由机头112的超声切割冲头113所产生的热量(即超声或“US电力级”)。然后,在步骤840,将用于冲洗流体流的热淬火量的近似值与由超声切割冲头113生成的热量进行比较,以便确定眼睛的近似温度。在步骤845中,确定眼睛的温度是否高于预定阈值或在阈值的某一余量内。例如,该余量可以是阈值内(例如低于)三度华氏温度(3°F),如图8所示。本领域的技术人员将意识到根据所需系统灵敏度,还能利用其他预定量或余量。
如果眼睛的温度不在余量(例如3°F)内或不超出阈值,那么能使用线性超声控制函数(步骤850)。然而,如果眼睛的温度在余量内或超出阈值,那么在步骤855中,系统利用算法来计算近似占空比。控制算法可以是例如标准线性控制算法,诸如PI(比例积分)或PID(比例-积分-导数)控制算法。控制算法也可以是非线性控制算法,诸如具有或不具有磁滞的开关式控制器。本领域的技术人员将意识到各种算法能用在不同应用中。
例如,在步骤860中,初始确定系统当前是否在连续模式中操作。在连续模式中,将连续电源施加到机头而不中断。如果系统在连续模式中,那么在步骤865,系统将操作模式从连续开关到脉冲超声电力。如果系统不在连续模式中,那么在步骤870中确定系统在突发还是脉冲模式中操作。
参考图9a-9b,突发模式提供超声电力的一系列周期性、固定宽度的恒定振幅脉冲900,这些脉冲分别在“断开”时间910后。本领域的技术人员将意识到在实际中,在图9a-9b和其他图中所示的脉冲不是“理想”脉冲。相反,由于例如电容和电感而发生不同状态间的脉冲转变或倾斜。因此,为说明和例示目的,提供图9a-9b和其他图中所示的理想或模型矩形脉冲,而实际上,脉冲不具有理想的矩形形状。
固定宽度脉冲900间的断开时间910受经例如下压踏板的外科医生输入控制。换句话说,在突发模式中,每一脉冲900具有固定的“接通”时间,以及变量“断开”时间。通过调整踏板或脚踏开关的位置,改变“断开”时间。
例如,图9a-9b示例说明在四个位置中的脚踏开关。当踏板初始位于位置1并进一步下压到位置2时,断开时间910减小,以及当踏板从位置2下压到位置3时,进一步减小。因此,随着进一步下压踏板,在一定时间周期中,固定宽度、恒定振幅脉冲的数量增加。随着进一步下压踏板,断开时间最终等于接通时间。在这种情况下,将踏板从位置3进一步下压到位置4导致脉冲振幅增加,同时维持相同的断开时间910。换句话说,在断开时间与接通时间相同后,能产生脉冲振幅,从而增加输送到机头的电力。
再参考图8和9a-9b,如果系统在突发模式中,在步骤875中,通过减小电源“开”时间或增加电源“关”时间,能调整具有相同脉冲宽度的超声电力的多个脉冲,从而在指定时间中提供更少固定宽度脉冲,以及将更少电力提供给超声冲头113,以便冷却冲头113。如果系统不在突发模式中,在步骤880,系统在脉冲模式中。
参考图8和10,如果系统在脉冲模式中,那么脉冲1000的振幅保持恒定,以及通过调整输送到机头112的电力脉冲的占空比,在步骤885中,能调整输送到机头的电力。在矩形脉冲1000的理想序列中,脉冲持续时间与脉冲周期之比或“高”脉冲电平的持续时间与“高”和“低”电平的持续时间的总和(一个周期)的比为占空比,表示为小数或百分比。因此,能改变每一恒定振幅脉冲1000的持续时间(例如变得更窄或更宽)以便改变占空比,由此改变输送到机头的电量。
另外,如果系统在连续模式中操作(860),以及眼睛的温度高于阈值,那么能断开电源直到眼睛温度下降低于阈值为止。另外,如果系统在突发或脉冲模式中操作,以及眼睛的温度高于阈值,对剩余脉冲,可以断开电源,以及如果必要,能延迟下一电力脉冲,直到眼睛温度下降低于阈值为止。
本领域的技术人员将意识到能与各种脉冲(例如连续型、脉冲型、突发型)和具有不同图(诸如在本说明书中稍后所述并如图14-24所示)的脉冲一起使用Thermal Watch特征,因为Thermal Watch充当周期性地确定所输送的电量的调节器,而与脉冲类型或脉冲图,以及与如何将所确定的电量与阈值进行比较,以及如何将电量与阈值比较(如前所述)无关。
当检测到堵塞事件时,能进行类似的电力调整。例如,在一个实施例中,通过超声占空比中增加“接通”时间或减少电源“断开”时间,能增加输送到冲头113的电力,以便增加机头112的切割效率。使用Thermal WatchTM特征,能监视眼睛温度以便在冲头113变得过热前,减小电源“接通”时间,或增加电源“断开”时间。因此,实施例提供必要时(例如堵塞事件发生时)有效增加电力,而且当必要时,有效地监视和降低电力,以便防止冲头113过热和烧伤或损坏眼睛组织的方式。
另一实施例针对负载检测系统和方法,通常称为“按需供电”,如果确定请求太多电力,能限制或管理外科医生请求的电量以便防止损坏眼睛组织。系统能利用变化的硬度检测切割冲头113何时不再与晶状体组织接触,或与晶状体组织的不同部分接触,以及自动地调整输送到机头的电量。
如前所述,由电源提供的电力驱动机头112中的一个或多个压电晶体。晶体振荡,又使机头中的针振动和发出超声能量。外科医生放置针以便将超声能量传送到眼睛组织,诸如晶状体,以便例如分解白内障。单独的抽吸系统用来去除组织碎片。外科医生可以通过例如下压脚踏开关或其他开关致动器,请求将一定量的电力输送到冲头113。在手术过程期间,系统将低电压电平施加到晶体上,使它们发出少量超声能量。然后测量在这种情况下晶体两端的电压和通过晶体的电流。使用电压和电流值来计算由机头耗费的电力值。当冲头113与更硬组织或物质(诸如白内障晶状体)接触时,超声机头112倾向于耗费更多电力以便维持指定冲程(振幅)。在较低电力设定值,已经发现可测量基于由典型的白内障手术中与冲头所遇到的物质的接触的该电力增加。在改进的脉冲模式中,将少量电力施加到用来切割组织的更高电力脉冲间的冲头112。换句话说,在低电力周期期间,施加少量电力。
例如,如图11所示,脉冲模式型驱动信号包括高或切割电力110a-e(通常1100)的交变间隔,以及在切割间隔1100间的低或检测电力1110a-e(通常1110)的交变间隔。然后,检测间隔1110的振幅大于零。换句话说,在切割间隔后,检测电力不减小到零。
在所示实施例中,切割间隔1100和检测间隔1110的持续时间近似相同。在检测间隔期间执行电压和电流测量以便将在检测间隔期间,机头112所耗费的电量与冲头113的负载1130关联。由于少量电力仍然施加到冲头上,某种程度的切割也会发生,然而,切割主要发生在较高电力切割间隔期间。因此,尽管本说明书引用“检测”间隔,但在该间隔期间,检测和切割均会发生。
然后,使用在检测间隔1110期间确定的、由机头112耗费的电量来调整下一或后续切割间隔1100的电力。基于所检测的电力和外科医生请求,成比例地调整电力。换句话说,如果在冲头检测到较高负载,在下一切割间隔,将输送由外科医生所请求的较大部分(可能全部)电力。同样地,如果检测到较低负载,在下一切割间隔1110期间,将输送由外科医生请求的少部分(可能没有)电力。
例如,在检测间隔1110a期间检测的电力将用来成比例地调整下一切割间隔1100b的电力电平。类似地,在检测间隔1110b期间检测的电力用来成比例地调整下一切割间隔1100c。因此,持续地调整切割电力1100以便补偿机头112的超声冲头113上的不同负载1130。
如图11所示,检测间隔1110的电力电平随时间相对恒定。然而,检测间隔1110可能改变,但应当不为零或太低以致检测不到冲头上的负载。检测间隔1110的电力电平能根据例如系统参数和测量装置的灵敏度改变。因此,使用非零检测周期的实施例与典型地使用交变高电力和零电力脉冲,即在“开”和“关”间开关,而不是在高电力和低电力间开关或在“开”和“低电力”间开关的已知“脉冲模式”驱动系统形成对比。
由于超声机头和切割冲头的变化,负载1130检测特征将会在每一手术开始时校准。例如,在“调谐周期”期间,执行校准,在该期间,将机头冲头113放在充满冲洗流体的测试室中。此时,在检测电力设定时,将超声电力施加到冲头113。将在该基准情形下,由机头112耗费的电量保存在控制系统存储器中,作为阈值或“无负载”情形。如果需要,当手术进行时,控制系统114可以使用自动阈值调整来基于在手术期间测量的负载1130,调整该阈值。
负载检测特征也允许外科医生控制由控制系统114进行的调整的灵敏度。更具体地说,灵敏度调整是设置当检测到低于全负载时所进行的电力降低的增益的线性或系数调整。只要设置阈值和灵敏度,可以基于算法,调整机头112的电力。
图12和13示例说明用于基于所检测的电压和电流负载1130,执行这些电力冲程或振幅变化的算法和基于该算法操作的系统的一个实施例。初始地,在步骤1200中确定阈值1355。如前所述,阈值电力1355是在冲洗液或盐或其他参考环境中,操作超声机头112后确定的固定值。换句话说,阈值电力1355表示当未切割组织时的基准电力。
在步骤1210中监视切割冲头113所耗费的电力。电源120耦合到机头112,并经电力管线1302,将电力输送到冲头113。电力控制系统1300经连接器1303-1305,连接到电源120的输入和输出。连接器1304和1305耦合到电源120的输出,以及连接器1303耦合到电源120的输入。
所示的电源控制系统1300包括用于电压和电流的反馈1310和1311。反馈元件1310和1311耦合到连接器1304和1305。在检测间隔1110期间获得的电压和电流测量值基于机头112中的压电晶体上的应力。如果针或冲头113遇到更耐切割(高负载)的组织,电压和/或电流的大小可能增加,而如果针或冲头113遇到更容易切割(低负载)的组织,电压和/或电流的大小可能降低。将在每一检测间隔1110期间,由反馈1310和1311获得的电压和电流值提供给各个均方根(“RMS”)转换器1320和1321。
RMS转换器1320和1321确定在预定时间周期上的平均电压大小和平均电流大小。这些RMS值提供给模数(“A/D”)转换器1330和1331,其将表示各个测量模拟电压和电流的数字信号提供给微处理器1340。
微处理器1340能是与上述相同的微处理器116或单独的微处理器或控制器。数字电压和电流值由A/D转换器1330和1331提供给微处理器1340。微处理器1340中的软件基于由A/D转换器1330和1331提供的值,将在检测间隔1110期间检测的“检测”电力1352计算1350为电力(“P”)=电压(“V”)×电流(“I”)。因此,计算包含线性计算,而不必考虑非线性属性,诸如相位和共振。检测电力1352然后与阈值或基准电力1355进行比较。
当机头112需要电力来切割组织时,即当机头112被施加除基本材料或流体,诸如盐外的东西时,所计算的检测电力1352超出阈值或基本电力1355。基于机头112的冲头113所遇到的组织的特性,在步骤1240中,不管在下一切割间隔期间的哪一点上,使用检测电力1352和阈值电力1355的比较来确定应当如何调整将输送到机头112的电力。将该比较乘以在机头或软件中存储的比例系数1356,其将检测电力1352超出阈值电力1355的量与所检测的完全负载1357的部分进行关联。比例系数可以是例如基于系统的先前操作经验确定的。
除该阈值比较和百分比负载计算外,由外科医生基于检测电力1352超出阈值电力1355的量设置灵敏度调整或系数1360以便表示在下一切割间隔期间,应当将由外科医生所请求的哪一部分传送到冲头。灵敏度系数1360范围从0-1或者通常表示为a%值,例如20%、50%或85%。这些值可以向外科医生表示为关、低、中、高或一些其他比例或表示。在步骤1250中,由(检测电压-阈值)x比例因子计算获得的值乘以灵敏度系数1360。以比较低灵敏度系数更高的灵敏度系数,将更大量请求电力1370(例如由脚踏开关1375的程度表示)输送到机头112。例如,如果外科医生经踏板1375请求“X”量电力1370,那么根据灵敏度系数1360,可以将一些、全部或无“X”电力1370传送到机头112。
因此,实际输送到机头112的电力1380可以低于或等于由外科医生1370通过下压踏板1375所请求的电量。因此,实施例使用基于灵敏度系数的线性关系和计算、阈值确定和线性计算,以便调整输送到机头112的电力1380的量。
图11示例说明包括与如图12和13所示的按需供电系统一起使用的切割和检测间隔的一个脉冲图。图11所示的脉冲图包括相对恒定和近似相同持续时间的切割和检测间隔。在另外的实施例中,对于不同切割和检测间隔,可以使用不同脉冲图,如图14-24所示。为示例说明不同切割和检测脉冲和间隔,所示脉冲不具有相应的负载,然而,本领域的技术人员将意识到根据机头的冲头上的负载,根据需要,可以调整切割间隔的大小。本说明书引用“间隔”和“脉冲”。脉冲是从零电力开始和结束的信号,而间隔可以视为脉冲的一部分,由此以零电力开始或结束。然而,为说明目的,这些术语可互换,因为它们均提供检测电力的持续时间和切割电力的持续时间。因此,打算使“间隔”包括“脉冲”以及打算使“脉冲”包括“间隔”。
参考图14,在另一实施例中,检测间隔1110的持续时间随时间近似相同并短于切割间隔1100的持续时间。在另一实施例中,如图15所示,检测间隔1110的持续时间随时间改变,以致短于、约等于或长于切割间隔。能调整检测间隔1110的持续时间以便调节例如信噪(S/N)比和系统响应。较长检测间隔1110可以提供更好S/N比和更衰减的响应。因此,能选择检测间隔1110的持续时间以便与系统部件和性能协调。
参考图16,在另外的实施例中,检测间隔1110能刚好先于单独的切割间隔1100。例如,在检测间隔1110期间,电力从零电平增加到低电力电平。刚好在检测间隔1100后为切割间隔1100。切割间隔1100处于比检测间隔1110更高的电力电平。在切割间隔1100后,电力返回到零,以及能重复间隔顺序。图17示例说明除高电力切割脉冲1100刚好在零电力周期后外的类似的结构。检测间隔1110刚好在较高电力电平切割间隔1100后,然后,紧跟零电力,根据需要可重复这一过程。
图18示例说明在单独的较高电力切割脉冲1100间,触发单独的低电力、检测脉冲110的另一实施例。在所示的实施例中,切割和检测脉冲1100和1110具有约相同的持续时间。图19示例说明利用单独的检测脉冲1110和切割脉冲1100且其中检测脉冲1110的持续时间短于切割脉冲1100的持续时间的另一实施例。图20示例说明单独的检测脉冲1110具有变动持续时间且在切割脉冲1100间的另一实施例。
图21示例说明包括单独的检测脉冲1110和切割脉冲1100且在检测脉冲1110的衰减2100期间获得电压和电流数据的另一实施例。在图22和23中进一步示例说明该实施例。代替如图11所示确定负载,系统能配置成确定检测间隔脉冲1110衰减到某一电平所用的时间。在冲头上的负载能影响衰变率。例如,较大负载将使检测脉冲更快地衰减,而较小负载将导致检测脉冲更慢地衰减。图22表示由于较小负载,花费较长衰减时间的检测脉冲,以及图23示例说明由于较大负载,更快速地衰减的检测脉冲。该衰减技术能施加到其他脉冲图,包括刚好在切割间隔后的检测间隔,诸如图17所示的检测间隔。
检测脉冲或间隔衰减到某一电平所需的时间能与冲头的负载关联。这能使用例如将衰减率与冲头处的负载交叉关联的查找表实现。然后,如果需要,使用该衰减和负载信息来调整下一切割脉冲或间隔的电力电平。例如,参见图22和23中的参考点C,图23所示的脉冲的衰减率快于图22所示的脉冲的衰减率。结果,在图22所示的检测脉冲后的下一切割脉冲期间输送的电量可以小于在图23所示的检测脉冲后的下一切割脉冲期间输送的电量,因为图23所示的脉冲由于冲头处的较大负载衰减更快。能重复衰减率分析以便连续地调整在下一切割脉冲或间隔期间,输送到冲头处的电力。
根据另一实施例,切割和检测脉冲能处于不同频率。例如,能以特定脉冲施加切割脉冲,以及能以切割脉冲频率的谐波的一个施加检测脉冲。例如,可以以约40kHz施加切割脉冲,以及能以谐波的一个,诸如80kHz或120kHz,施加检测脉冲。
本领域的技术人员将意识到图11和14-23提供为示例性检测和切割间隔图,以及不打算限制,因为检测和切割间隔能根据不同系统和应用的需要调整。另外,本领域的技术人员将意识到在较低电力检测间隔期间,检测和某种程度的切割可以发生,因为检测发生在非零电平,以及某些切割会发生,尽管与在较高电力切割间隔期间发生的切割相比,切割量较小。本领域的技术人员也将意识到Thermal Watch特征可用于这些不同脉冲图,因为Thermal Watch考虑所输送的电量以及不取决于特定脉冲图。
参考图24,在另一实施例中,将切割脉冲1100的衰减率2400与冲头处的负载关联。根据切割脉冲1100的振幅,期望采样衰减脉冲2400的末端2410,因为在衰减周期开始时,衰减切割脉冲的电力电平可能太高,从而导致与电力和电流测量干扰。能以查找表交叉参考切割脉冲衰减到某一电平所需的时间以便能将衰减率与冲头处的负载关联。然后如果需要,使用该衰减和负载信息来调整下一切割脉冲的电力电平。
尽管在上述描述中参考各种实施例,本领域的普通技术人员将意识到在不背离实施例的范围的情况下,可以对所述实施例做出非实质改进、改变和替代。例如,本领域的普通技术人员将意识到能单独或结合操作各个性能和实施例。例如,在另一实施例中,旨在确定抽吸真空和/或冲洗压力的改变的实施例能与图7和8所示的“ThermalWatch”实施例和/或参考图9-11所述和所示的“按需供电”实施例结合。类似地,参考图7和8所述和所示的“Thermal Watch”实施例能与参考图9-11所述和所示的按需供电实施例结合。因此,实施例能一起或单独地操作以便提供所需系统功能性。
Claims (54)
1.一种具有超声机头(112)的外科系统(100),所述超声机头(112)具有切割冲头(113),所述外科系统(100)包括:
用于建立阈值温度的装置;
用于监视在延伸到所述超声机头的管线中的冲洗压力的装置;
用于计算冲洗流体的流率的装置;
用于确定用于所计算的冲洗流体的流率的吸热量的装置;
用于基于所确定的吸热量和提供给所述超声机头的电量,确定眼睛的温度的装置;
用于将所确定的眼睛温度与阈值温度进行比较的装置;
用于确定冲洗压力的变化率的装置;
用于基于冲洗流体的变化率,确定堵塞阶段的装置;以及
用于基于所确定的堵塞阶段和基于所确定的温度和阈值温度的比较,如果必要,调整输送到所述超声机头的切割冲头的电量的装置。
2.如权利要求1所述的系统,所述用于调整电量的装置包括用于调整所述超声机头的输出的占空比的装置。
3.如权利要求1所述的系统,所述用于调整电量的装置包括用于调整所述超声机头的输出的冲程或振幅的装置。
4.如权利要求1所述的系统,所述用于调整电量的装置包括用于如果所确定的温度超出阈值温度则降低电力的装置。
5.如权利要求1所述的系统,所述用于调整电量的装置包括用于如果所确定的温度低于阈值温度则维持或增加电力的装置。
6.如权利要求1所述的系统,进一步包括用于检测冲洗压力的数据图的装置。
7.如权利要求6所述的系统,所述用于检测图的装置包括用于确定在外科系统操作期间预定图和冲洗压力数据间的线性关联的装置。
8.如权利要求7所述的系统,所述用于确定线性关联的装置包括用于执行线性变换的装置。
9.如权利要求6所述的系统,所述用于检测图的装置包括用于计算第一操作参数的数据随时间的导数的装置。
10.如权利要求6所述的系统,所述用于检测图的装置包括用于在外科系统操作期间,执行预定图和第一操作参数的数据的卷积的装置。
11.如权利要求1所述的系统,进一步包括用于确定所述超声机头的抽吸真空的变化率的装置。
12.如权利要求11所述的系统,所述用于确定堵塞阶段的装置基于冲洗压力的变化率和抽吸真空的变化率来确定所述堵塞阶段。
13.如权利要求1所述的系统,所述用于确定堵塞阶段的装置包括用于识别堵塞的开始或初步指征的装置。
14.如权利要求13所述的系统,所述堵塞的开始通过正在增加的抽吸真空来识别。
15.如权利要求13所述的系统,进一步包括用于确定抽吸真空的变化率的装置,所述堵塞的开始通过正在增加的冲洗压力和抽吸真空来识别。
16.如权利要求15所述的系统,所述堵塞的开始通过冲洗压力以比抽吸真空更快的速率增加来识别。
17.如权利要求1所述的系统,所述用于确定堵塞阶段的装置包括用于识别堵塞前期状况的装置。
18.如权利要求17所述的系统,所述堵塞前期状况通过基本上恒定的冲洗压力来识别。
19.如权利要求17所述的系统,进一步包括用于确定抽吸真空的变化率的装置,所述堵塞前期状况通过基本上恒定的冲洗压力和正在增加的抽吸真空来识别。
20.如权利要求19所述的系统,在堵塞前期状况下的抽吸真空的增加率小于在堵塞开始和堵塞前期状况之间的时间段期间的增加率。
21.如权利要求1所述的系统,所述用于确定堵塞阶段的装置包括用于识别完全堵塞的装置。
22.如权利要求21所述的系统,进一步包括用于确定抽吸真空的变化率的装置,所述完全堵塞通过基本上恒定的冲洗压力和抽吸真空来识别。
23.如权利要求1所述的系统,所述用于确定堵塞阶段的装置包括用于识别堵塞解除的装置。
24.如权利要求23所述的系统,所述堵塞解除通过正在减小的冲洗压力来识别。
25.如权利要求23所述的系统,进一步包括用于确定抽吸真空的变化率的装置,所述堵塞解除通过正在减小的冲洗压力和抽吸真空来识别。
26.如权利要求1所述的系统,所述用于确定堵塞阶段的装置包括用于识别从堵塞解除恢复的装置。
27.如权利要求26所述的系统,所述恢复通过冲洗压力的减小速率的减慢来识别。
28.如权利要求27所述的系统,进一步包括用于确定抽吸真空的变化率的装置,所述恢复通过冲洗压力的减小速率的减慢和抽吸真空的减小速率的减慢来识别。
29.如权利要求1所述的系统,所述用于确定堵塞阶段的装置包括:
用于识别堵塞开始的装置,
用于识别在开始后的堵塞前期状况的装置,
用于识别在堵塞前期状况后的完全堵塞的装置,
用于识别完全堵塞解除的装置,和
用于识别在解除后恢复的装置。
30.一种具有超声机头(112)的外科系统(100),所述超声机头(112)具有切割冲头(113),所述外科系统(100)包括:
用于建立阈值温度的装置;
用于监视在延伸到所述超声机头的管线中的冲洗压力的装置;
用于计算冲洗流体的流率的装置;
用于确定用于所计算的冲洗流体的流率的吸热量的装置;
用于基于所确定的吸热量和提供给所述超声机头的电量,确定眼睛的温度的装置;
用于将所确定的眼睛温度与阈值温度进行比较的装置;
用于确定冲洗压力的变化率的装置;
用于基于冲洗流体的变化率,确定堵塞阶段的装置;以及
用于基于所确定的堵塞阶段和基于所确定的温度和阈值温度的比较,如果必要,调整输送到所述超声机头的切割冲头的电量的装置,
其中,如果所确定的温度超出阈值温度,则降低输送到所述机头的电力,如果所确定的温度低于阈值温度,则维持或增加输送到所述机头的电力。
31.如权利要求30所述的系统,所述用于调整电量的装置包括用于调整所述超声机头的输出的占空比的装置。
32.如权利要求30所述的系统,所述用于调整电量的装置包括用于调整所述超声机头的输出的冲程或振幅的装置。
33.如权利要求30所述的系统,进一步包括用于检测冲洗压力的数据图的装置。
34.如权利要求33所述的系统,所述用于检测图的装置包括用于确定在外科系统操作期间预定图和冲洗压力数据间的线性关联的装置。
35.如权利要求34所述的系统,所述用于确定线性关联的装置包括用于执行线性变换的装置。
36.如权利要求33所述的系统,所述用于检测图的装置包括用于计算冲洗压力的数据随时间的导数的装置。
37.如权利要求33所述的系统,所述用于检测图的装置包括用于在操作外科系统期间预定图和执行冲洗压力的数据的卷积的装置。
38.如权利要求30所述的系统,进一步包括用于确定抽吸真空的变化率的装置。
39.如权利要求38所述的系统,所述用于确定堵塞阶段的装置基于冲洗压力的变化率和抽吸真空的变化率来确定所述堵塞阶段。
40.如权利要求30所述的系统,所述用于确定堵塞阶段的装置包括用于识别堵塞的开始或初步指征的装置。
41.如权利要求40所述的系统,所述堵塞的开始通过正在增加的抽吸真空来识别。
42.如权利要求30所述的系统,所述用于确定堵塞阶段的装置包括用于识别堵塞前期状况的装置。
43.如权利要求42所述的系统,所述堵塞前期状况通过基本上恒定的冲洗压力来识别。
44.如权利要求42所述的系统,进一步包括用于确定抽吸真空的变化率的装置,所述堵塞前期状况通过基本上恒定的冲洗压力和正在增加的抽吸真空来识别。
45.如权利要求44所述的系统,在堵塞前期状况下的真空压力的增加率小于在堵塞开始和堵塞前期状况之间的时间段期间的增加率。
46.如权利要求30所述的系统,所述用于确定堵塞阶段的装置包括用于识别完全堵塞的装置。
47.如权利要求46所述的系统,进一步包括用于确定抽吸真空的变化率的装置,所述完全堵塞通过基本上恒定的冲洗压力和抽吸真空来识别。
48.如权利要求30所述的系统,所述用于确定堵塞阶段的装置包括用于识别堵塞解除的装置。
49.如权利要求48所述的系统,所述堵塞解除通过正在减小的冲洗压力来识别。
50.如权利要求48所述的系统,进一步包括用于确定抽吸真空的变化率的装置,所述堵塞解除通过正在减小的冲洗压力和抽吸真空来识别。
51.如权利要求30所述的系统,所述用于确定堵塞阶段的装置包括用于识别从堵塞解除恢复的装置。
52.如权利要求51所述的系统,所述恢复通过冲洗压力的减小速率的减慢来识别。
53.如权利要求51所述的系统,进一步包括用于确定抽吸真空的变化率的装置,所述恢复通过冲洗压力的减小速率的减慢和抽吸真空的减小速率的减慢来识别。
54.如权利要求30所述的系统,所述用于确定堵塞阶段的装置包括:
用于识别堵塞开始的装置,
用于识别在开始后的堵塞前期状况的装置,
用于识别在堵塞前期状况后的完全堵塞的装置,
用于识别完全堵塞解除的装置,或
用于识别在解除后恢复的装置。
Applications Claiming Priority (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US55524004P | 2004-03-22 | 2004-03-22 | |
| US60/555,240 | 2004-03-22 | ||
| US10/818,314 | 2004-04-05 | ||
| US10/818,314 US7297137B2 (en) | 2004-03-22 | 2004-04-05 | Method of detecting surgical events |
| US58769304P | 2004-07-14 | 2004-07-14 | |
| US60/587,693 | 2004-07-14 | ||
| US11/067,959 | 2005-02-28 | ||
| US11/067,959 US7645255B2 (en) | 2004-03-22 | 2005-02-28 | Method of controlling a surgical system based on irrigation flow |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101123917A CN101123917A (zh) | 2008-02-13 |
| CN100558306C true CN100558306C (zh) | 2009-11-11 |
Family
ID=38769905
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB2005800092905A Active CN100558306C (zh) | 2004-03-22 | 2005-03-21 | 基于冲洗流控制外科系统的系统 |
Country Status (11)
| Country | Link |
|---|---|
| US (4) | US7645255B2 (zh) |
| EP (1) | EP1729658B1 (zh) |
| JP (1) | JP4629726B2 (zh) |
| CN (1) | CN100558306C (zh) |
| AT (1) | ATE433718T1 (zh) |
| AU (1) | AU2005226682B2 (zh) |
| BR (1) | BRPI0509072B8 (zh) |
| CA (1) | CA2559499C (zh) |
| DE (1) | DE602005014948D1 (zh) |
| ES (1) | ES2327053T3 (zh) |
| WO (1) | WO2005092022A2 (zh) |
Families Citing this family (82)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7169123B2 (en) * | 1997-01-22 | 2007-01-30 | Advanced Medical Optics, Inc. | Control of pulse duty cycle based upon footswitch displacement |
| US6780165B2 (en) * | 1997-01-22 | 2004-08-24 | Advanced Medical Optics | Micro-burst ultrasonic power delivery |
| US6558385B1 (en) | 2000-09-22 | 2003-05-06 | Tissuelink Medical, Inc. | Fluid-assisted medical device |
| EP1946716B1 (en) | 2000-03-06 | 2017-07-19 | Salient Surgical Technologies, Inc. | Fluid delivery system and controller for electrosurgical devices |
| US7811282B2 (en) | 2000-03-06 | 2010-10-12 | Salient Surgical Technologies, Inc. | Fluid-assisted electrosurgical devices, electrosurgical unit with pump and methods of use thereof |
| US6689131B2 (en) | 2001-03-08 | 2004-02-10 | Tissuelink Medical, Inc. | Electrosurgical device having a tissue reduction sensor |
| US8048070B2 (en) | 2000-03-06 | 2011-11-01 | Salient Surgical Technologies, Inc. | Fluid-assisted medical devices, systems and methods |
| US7077820B1 (en) * | 2002-10-21 | 2006-07-18 | Advanced Medical Optics, Inc. | Enhanced microburst ultrasonic power delivery system and method |
| US7316664B2 (en) * | 2002-10-21 | 2008-01-08 | Advanced Medical Optics, Inc. | Modulated pulsed ultrasonic power delivery system and method |
| US8475455B2 (en) | 2002-10-29 | 2013-07-02 | Medtronic Advanced Energy Llc | Fluid-assisted electrosurgical scissors and methods |
| CA2830583C (en) * | 2003-03-12 | 2015-06-09 | Abbott Medical Optics Inc. | System and method for pulsed ultrasonic power delivery employing cavitation effects |
| US7727232B1 (en) | 2004-02-04 | 2010-06-01 | Salient Surgical Technologies, Inc. | Fluid-assisted medical devices and methods |
| US7645255B2 (en) * | 2004-03-22 | 2010-01-12 | Alcon, Inc. | Method of controlling a surgical system based on irrigation flow |
| US7625388B2 (en) | 2004-03-22 | 2009-12-01 | Alcon, Inc. | Method of controlling a surgical system based on a load on the cutting tip of a handpiece |
| US7785316B2 (en) * | 2005-03-21 | 2010-08-31 | Abbott Medical Optics Inc. | Application of a system parameter as a method and mechanism for controlling eye chamber stability |
| US7670330B2 (en) * | 2005-03-21 | 2010-03-02 | Abbott Medical Optics Inc. | Application of vacuum as a method and mechanism for controlling eye chamber stability |
| US8353297B2 (en) * | 2005-08-31 | 2013-01-15 | Novartis Ag | Pulse manipulation for controlling a phacoemulsification surgical system |
| US20070293844A1 (en) * | 2005-09-28 | 2007-12-20 | Nader Nazarifar | Intraocular pressure control |
| US10499937B2 (en) * | 2006-05-19 | 2019-12-10 | Recor Medical, Inc. | Ablation device with optimized input power profile and method of using the same |
| US7785336B2 (en) * | 2006-08-01 | 2010-08-31 | Abbott Medical Optics Inc. | Vacuum sense control for phaco pulse shaping |
| US20080103430A1 (en) * | 2006-10-30 | 2008-05-01 | Gomez Mario P | Apparatus to facilitate removal of cataracts from the eyes |
| US8142388B2 (en) * | 2006-10-30 | 2012-03-27 | Gomez Mario P | Apparatus to facilitate removal of cataracts of from the eyes |
| US8414534B2 (en) | 2006-11-09 | 2013-04-09 | Abbott Medical Optics Inc. | Holding tank devices, systems, and methods for surgical fluidics cassette |
| US10959881B2 (en) | 2006-11-09 | 2021-03-30 | Johnson & Johnson Surgical Vision, Inc. | Fluidics cassette for ocular surgical system |
| US8491528B2 (en) | 2006-11-09 | 2013-07-23 | Abbott Medical Optics Inc. | Critical alignment of fluidics cassettes |
| US8579929B2 (en) * | 2006-12-08 | 2013-11-12 | Alcon Research, Ltd. | Torsional ultrasound hand piece that eliminates chatter |
| US20080139994A1 (en) * | 2006-12-08 | 2008-06-12 | Alcon, Inc. | Torsional Ultrasound at Resonant Frequencies That Eliminate Chatter |
| CN101568306A (zh) * | 2006-12-22 | 2009-10-28 | 爱尔康研究有限公司 | 显微外科器械的操作方法 |
| US20080249412A1 (en) * | 2007-04-02 | 2008-10-09 | Doheny Eye Institute | Preoperative and Intra-Operative Lens Hardness Measurement by Ultrasound |
| US10596032B2 (en) * | 2007-05-24 | 2020-03-24 | Johnson & Johnson Surgical Vision, Inc. | System and method for controlling a transverse phacoemulsification system with a footpedal |
| US10363166B2 (en) | 2007-05-24 | 2019-07-30 | Johnson & Johnson Surgical Vision, Inc. | System and method for controlling a transverse phacoemulsification system using sensed data |
| US10485699B2 (en) | 2007-05-24 | 2019-11-26 | Johnson & Johnson Surgical Vision, Inc. | Systems and methods for transverse phacoemulsification |
| US8721594B2 (en) * | 2007-06-19 | 2014-05-13 | Alcon Research, Ltd. | Post-occlusion chamber collapse canceling system for a surgical apparatus and method of use |
| US20080319451A1 (en) * | 2007-06-21 | 2008-12-25 | Jaime Zacharias | Post-occlusion chamber collapse suppressing system for a surgical apparatus and method of use |
| US10342701B2 (en) | 2007-08-13 | 2019-07-09 | Johnson & Johnson Surgical Vision, Inc. | Systems and methods for phacoemulsification with vacuum based pumps |
| EP2092916A1 (en) * | 2008-02-19 | 2009-08-26 | Institut National De La Sante Et De La Recherche Medicale (Inserm) | A method of treating an ocular pathology by applying high intensity focused ultrasound and device thereof |
| AU2009215477B2 (en) * | 2008-02-20 | 2014-10-23 | Mayo Foundation For Medical Education And Research | Systems, devices and methods for accessing body tissue |
| CA2715895A1 (en) * | 2008-02-20 | 2009-08-27 | Mayo Foundation For Medical Education And Research | Ultrasound guided systems and methods |
| US9289541B2 (en) | 2008-08-22 | 2016-03-22 | Medtronic, Inc. | Surgical fluid management system |
| US8226677B2 (en) * | 2008-10-22 | 2012-07-24 | Stryker Corporation | Sensing arrangement for control of powered cutting device |
| US9005157B2 (en) | 2008-11-07 | 2015-04-14 | Abbott Medical Optics Inc. | Surgical cassette apparatus |
| US10219940B2 (en) | 2008-11-07 | 2019-03-05 | Johnson & Johnson Surgical Vision, Inc. | Automatically pulsing different aspiration levels to an ocular probe |
| CA2941766A1 (en) | 2008-11-07 | 2010-05-14 | Abbott Medical Optics Inc. | Automatically switching different aspiration levels and/or pumps to an ocular probe |
| WO2010054146A1 (en) | 2008-11-07 | 2010-05-14 | Abbott Medical Optics Inc. | Method for programming foot pedal settings and controlling performance through foot pedal variation |
| US8854221B2 (en) * | 2008-12-19 | 2014-10-07 | Bausch & Lomb Incorporated | System to identify viscosity of aspirated material during ophthalmic surgery |
| US8449444B2 (en) | 2009-02-27 | 2013-05-28 | Thoratec Corporation | Blood flow meter |
| US8562507B2 (en) | 2009-02-27 | 2013-10-22 | Thoratec Corporation | Prevention of aortic valve fusion |
| US8623040B2 (en) | 2009-07-01 | 2014-01-07 | Alcon Research, Ltd. | Phacoemulsification hook tip |
| US20110118728A1 (en) * | 2009-11-13 | 2011-05-19 | Alcon Research, Ltd. | Control of high-intensity pulsed electrical fields in surgical applications |
| US8070711B2 (en) * | 2009-12-09 | 2011-12-06 | Alcon Research, Ltd. | Thermal management algorithm for phacoemulsification system |
| US9795404B2 (en) * | 2009-12-31 | 2017-10-24 | Tenex Health, Inc. | System and method for minimally invasive ultrasonic musculoskeletal tissue treatment |
| US8689439B2 (en) | 2010-08-06 | 2014-04-08 | Abbott Laboratories | Method for forming a tube for use with a pump delivery system |
| WO2012031130A1 (en) * | 2010-09-03 | 2012-03-08 | Hernandez Lyndon V | Colonoscopy systems and methods |
| US10258505B2 (en) | 2010-09-17 | 2019-04-16 | Alcon Research, Ltd. | Balanced phacoemulsification tip |
| EP3020426B1 (en) | 2010-09-24 | 2017-12-27 | Tc1 Llc | Generating artificial pulse |
| AU2011305243A1 (en) | 2010-09-24 | 2013-04-04 | Thoratec Corporation | Control of circulatory assist systems |
| US8377001B2 (en) | 2010-10-01 | 2013-02-19 | Abbott Laboratories | Feeding set for a peristaltic pump system |
| US8377000B2 (en) | 2010-10-01 | 2013-02-19 | Abbott Laboratories | Enteral feeding apparatus having a feeding set |
| US20120302941A1 (en) * | 2011-05-23 | 2012-11-29 | Dan Teodorescu | Phacoemulsification systems and associated user-interfaces and methods |
| US8414605B2 (en) * | 2011-07-08 | 2013-04-09 | Alcon Research, Ltd. | Vacuum level control of power for phacoemulsification hand piece |
| US9050627B2 (en) | 2011-09-02 | 2015-06-09 | Abbott Medical Optics Inc. | Systems and methods for ultrasonic power measurement and control of phacoemulsification systems |
| US9517162B2 (en) | 2011-11-30 | 2016-12-13 | Alcon Research, Ltd. | Retinal surgery |
| MX346230B (es) | 2011-12-08 | 2017-03-13 | Alcon Res Ltd | Elementos de válvulas móviles de manera selectiva para circuitos de aspiración e irrigación. |
| US9700457B2 (en) | 2012-03-17 | 2017-07-11 | Abbott Medical Optics Inc. | Surgical cassette |
| US11406415B2 (en) | 2012-06-11 | 2022-08-09 | Tenex Health, Inc. | Systems and methods for tissue treatment |
| US9149291B2 (en) | 2012-06-11 | 2015-10-06 | Tenex Health, Inc. | Systems and methods for tissue treatment |
| US9549850B2 (en) | 2013-04-26 | 2017-01-24 | Novartis Ag | Partial venting system for occlusion surge mitigation |
| WO2015160991A1 (en) | 2014-04-15 | 2015-10-22 | Thoratec Corporation | Methods and systems for controlling a blood pump |
| US9962181B2 (en) | 2014-09-02 | 2018-05-08 | Tenex Health, Inc. | Subcutaneous wound debridement |
| DE102015005331B3 (de) | 2015-04-25 | 2016-08-18 | Carl Zeiss Meditec Ag | Steuerungsvorrichtung für ein Phakoemulsifikationssystem und Phakoemulsifikationssystem mit einer solchen Steuerungsvorrichtung |
| US9763689B2 (en) | 2015-05-12 | 2017-09-19 | Tenex Health, Inc. | Elongated needles for ultrasonic applications |
| US11071816B2 (en) | 2017-10-04 | 2021-07-27 | Johnson & Johnson Surgical Vision, Inc. | System, apparatus and method for monitoring anterior chamber intraoperative intraocular pressure |
| WO2019069189A1 (en) | 2017-10-04 | 2019-04-11 | Johnson & Johnson Surgical Vision, Inc. | SYSTEM AND METHOD FOR INCREASING IRRIGATION PRESSURE AND MAINTAINING IOP DURING POST-OCCLUSION AFFLUX |
| EP3691585B1 (en) | 2017-10-04 | 2023-09-27 | Johnson & Johnson Surgical Vision, Inc. | Systems for measuring fluid flow in a venturi based system |
| NL2020558B1 (en) | 2018-03-09 | 2019-09-13 | D O R C Dutch Ophthalmic Res Center International B V | An ophthalmic pressure control system, a kit of parts and a method |
| CN112451204A (zh) * | 2019-09-09 | 2021-03-09 | 荷兰眼科研究中心(国际)有限公司 | 眼科压力控制系统、成套部件以及方法 |
| DE102019216670A1 (de) * | 2019-10-29 | 2021-04-29 | Carl Zeiss Meditec Ag | Ophthalmochirurgische Steuerungsmodulvorrichtung |
| US11877953B2 (en) | 2019-12-26 | 2024-01-23 | Johnson & Johnson Surgical Vision, Inc. | Phacoemulsification apparatus |
| US20210361481A1 (en) * | 2020-05-21 | 2021-11-25 | Johnson & Johnson Surgical Vision, Inc. | Phacoemulsification probe comprising magnetic sensors and/or multiple independent piezoelectric vibrators |
| DE102020112851A1 (de) | 2020-05-12 | 2021-11-18 | Carl Zeiss Meditec Ag | Steuergerät für eine elektrische Antriebseinheit eines ophthalmochirurgischen Handstücks und Verfahren zu dessen Betrieb, ophthalmochirurgische Vorrichtung und System |
| US11883326B2 (en) * | 2020-11-03 | 2024-01-30 | Johnson & Johnson Surgical Vision, Inc. | Phacoemulsification probe stroke length maximization system |
| US11844544B2 (en) | 2021-08-25 | 2023-12-19 | Medtronic Ps Medical, Inc. | Irrigation devices in debridement systems |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2001097728A1 (en) * | 1998-03-10 | 2001-12-27 | Advanced Medical Optics, Inc. | Phaco thermal control apparatus and method |
Family Cites Families (105)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3526219A (en) * | 1967-07-21 | 1970-09-01 | Ultrasonic Systems | Method and apparatus for ultrasonically removing tissue from a biological organism |
| NL145136C (zh) | 1967-07-25 | 1900-01-01 | ||
| US3601126A (en) | 1969-01-08 | 1971-08-24 | Electro Medical Systems Inc | High frequency electrosurgical apparatus |
| US3693613A (en) | 1970-12-09 | 1972-09-26 | Cavitron Corp | Surgical handpiece and flow control system for use therewith |
| US3812855A (en) | 1971-12-15 | 1974-05-28 | Surgical Design Corp | System for controlling fluid and suction pressure |
| US3812858A (en) | 1972-10-24 | 1974-05-28 | Sybron Corp | Dental electrosurgical unit |
| US3952732A (en) * | 1972-12-26 | 1976-04-27 | Shock John P | Ultrasonic cataract removal method and apparatus |
| US3942519A (en) * | 1972-12-26 | 1976-03-09 | Ultrasonic Systems, Inc. | Method of ultrasonic cryogenic cataract removal |
| US3857387A (en) * | 1972-12-26 | 1974-12-31 | Ultrasonic Systems | Ultrasonic cataract removal method and apparatus |
| US3902495A (en) | 1974-01-28 | 1975-09-02 | Cavitron Corp | Flow control system |
| US3956826A (en) * | 1974-03-19 | 1976-05-18 | Cavitron Corporation | Ultrasonic device and method |
| US3930505A (en) | 1974-06-24 | 1976-01-06 | Hydro Pulse Corporation | Surgical apparatus for removal of tissue |
| US4024467A (en) | 1974-07-15 | 1977-05-17 | Sybron Corporation | Method for controlling power during electrosurgery |
| US4024866A (en) | 1974-12-02 | 1977-05-24 | Hydro Pulse Corporation | Surgical apparatus for removal of tissue |
| US3964487A (en) | 1974-12-09 | 1976-06-22 | The Birtcher Corporation | Uncomplicated load-adapting electrosurgical cutting generator |
| DE2504280C3 (de) | 1975-02-01 | 1980-08-28 | Hans Heinrich Prof. Dr. 8035 Gauting Meinke | Vorrichtung zum Schneiden und/oder Koagulieren menschlichen Gewebes mit Hochfrequenzstrom |
| US3990452A (en) * | 1975-06-13 | 1976-11-09 | Fibra-Sonics, Inc. | Medical machine for performing surgery and treating using ultrasonic energy |
| US4126137A (en) | 1977-01-21 | 1978-11-21 | Minnesota Mining And Manufacturing Company | Electrosurgical unit |
| US4184510A (en) | 1977-03-15 | 1980-01-22 | Fibra-Sonics, Inc. | Valued device for controlling vacuum in surgery |
| US4180074A (en) | 1977-03-15 | 1979-12-25 | Fibra-Sonics, Inc. | Device and method for applying precise irrigation, aspiration, medication, ultrasonic power and dwell time to biotissue for surgery and treatment |
| US4168707A (en) | 1977-06-13 | 1979-09-25 | Douvas Nicholas G | Control apparatus for microsurgical instruments |
| DE2741107A1 (de) * | 1977-09-13 | 1979-03-29 | Heldt Gert Dipl Ing Dr | Verfahren zum loesen von ineinandergefuegten bauteilen |
| US4223676A (en) | 1977-12-19 | 1980-09-23 | Cavitron Corporation | Ultrasonic aspirator |
| US4246902A (en) | 1978-03-10 | 1981-01-27 | Miguel Martinez | Surgical cutting instrument |
| US4493694A (en) | 1980-10-17 | 1985-01-15 | Cooper Lasersonics, Inc. | Surgical pre-aspirator |
| US4496342A (en) | 1981-03-20 | 1985-01-29 | Surgical Design Corporation | Surge prevention system for an ophthalmic instrument |
| US4417578A (en) * | 1981-03-20 | 1983-11-29 | Surgical Design | Ultrasonic transducer with energy shielding |
| US4406284B1 (en) * | 1981-03-20 | 1997-11-18 | Surgical Design Corp | Ultrasonic handpiece design |
| US4590935A (en) | 1981-11-02 | 1986-05-27 | Optikon Oftalmologia, S.P.A. | Control system for intraocular surgical device |
| US4504264A (en) * | 1982-09-24 | 1985-03-12 | Kelman Charles D | Apparatus for and method of removal of material using ultrasonic vibraton |
| DE3378719D1 (en) | 1983-05-24 | 1989-01-26 | Chang Sien Shih | Electro-surgical unit control apparatus |
| US4508532A (en) | 1983-09-09 | 1985-04-02 | Ninetronix, Inc. | Ophthalmic aspirator/irrigator and cystotome |
| US4658819A (en) | 1983-09-13 | 1987-04-21 | Valleylab, Inc. | Electrosurgical generator |
| US4515583A (en) | 1983-10-17 | 1985-05-07 | Coopervision, Inc. | Operative elliptical probe for ultrasonic surgical instrument and method of its use |
| US4609368A (en) | 1984-08-22 | 1986-09-02 | Dotson Robert S Jun | Pneumatic ultrasonic surgical handpiece |
| US4589415A (en) | 1984-08-31 | 1986-05-20 | Haaga John R | Method and system for fragmenting kidney stones |
| US4739759A (en) | 1985-02-26 | 1988-04-26 | Concept, Inc. | Microprocessor controlled electrosurgical generator |
| US4750488A (en) | 1986-05-19 | 1988-06-14 | Sonomed Technology, Inc. | Vibration apparatus preferably for endoscopic ultrasonic aspirator |
| US4922902A (en) | 1986-05-19 | 1990-05-08 | Valleylab, Inc. | Method for removing cellular material with endoscopic ultrasonic aspirator |
| US4770654A (en) | 1985-09-26 | 1988-09-13 | Alcon Laboratories Inc. | Multimedia apparatus for driving powered surgical instruments |
| US4712544A (en) | 1986-02-12 | 1987-12-15 | Castle Company | Electrosurgical generator |
| US4989588A (en) | 1986-03-10 | 1991-02-05 | Olympus Optical Co., Ltd. | Medical treatment device utilizing ultrasonic wave |
| US4827911A (en) * | 1986-04-02 | 1989-05-09 | Cooper Lasersonics, Inc. | Method and apparatus for ultrasonic surgical fragmentation and removal of tissue |
| US4705500A (en) | 1986-07-17 | 1987-11-10 | Mentor O & O, Inc. | Ophthalmic aspirator-irrigator |
| US4793346A (en) | 1986-09-04 | 1988-12-27 | Bruce Mindich | Process and apparatus for harvesting vein |
| US4961424A (en) * | 1987-08-05 | 1990-10-09 | Olympus Optical Co., Ltd. | Ultrasonic treatment device |
| DE3751452D1 (de) | 1987-11-17 | 1995-09-14 | Erbe Elektromedizin | Hochfrequenz-Chirugiegerät zum Schneiden und/oder Koagulieren biologischer Gewebe. |
| US4869715A (en) | 1988-04-21 | 1989-09-26 | Sherburne Fred S | Ultrasonic cone and method of construction |
| US4989583A (en) | 1988-10-21 | 1991-02-05 | Nestle S.A. | Ultrasonic cutting tip assembly |
| US5180363A (en) | 1989-04-27 | 1993-01-19 | Sumitomo Bakelite Company Company Limited | Operation device |
| US5151085A (en) | 1989-04-28 | 1992-09-29 | Olympus Optical Co., Ltd. | Apparatus for generating ultrasonic oscillation |
| US5154694A (en) * | 1989-06-06 | 1992-10-13 | Kelman Charles D | Tissue scraper device for medical use |
| US5139509A (en) | 1989-08-25 | 1992-08-18 | Site Microsurgical Systems, Inc. | Phacoemulsification system with handpiece simulator |
| DE3932966C1 (zh) * | 1989-10-03 | 1991-04-04 | Richard Wolf Gmbh, 7134 Knittlingen, De | |
| US5026387A (en) | 1990-03-12 | 1991-06-25 | Ultracision Inc. | Method and apparatus for ultrasonic surgical cutting and hemostatis |
| AU630294B2 (en) * | 1990-05-11 | 1992-10-22 | Sumitomo Bakelite Company Limited | Surgical ultrasonic horn |
| DE69024805T2 (de) * | 1990-05-17 | 1996-05-23 | Sumitomo Bakelite Co | Chirurgisches instrument |
| US5722945A (en) * | 1990-07-17 | 1998-03-03 | Aziz Yehia Anis | Removal of tissue |
| US5222959A (en) * | 1990-07-17 | 1993-06-29 | Anis Aziz Y | Removal of tissue |
| US5160317A (en) | 1991-01-03 | 1992-11-03 | Costin John A | Computer controlled smart phacoemulsification method and apparatus |
| US5279547A (en) | 1991-01-03 | 1994-01-18 | Alcon Surgical Inc. | Computer controlled smart phacoemulsification method and apparatus |
| US5304115A (en) * | 1991-01-11 | 1994-04-19 | Baxter International Inc. | Ultrasonic angioplasty device incorporating improved transmission member and ablation probe |
| US5154696A (en) | 1991-04-08 | 1992-10-13 | Shearing Steven P | Phacoemulsification, irrigation and aspiration method and apparatus |
| US5242385A (en) * | 1991-10-08 | 1993-09-07 | Surgical Design Corporation | Ultrasonic handpiece |
| US5188589A (en) * | 1991-10-10 | 1993-02-23 | Alcon Surgical, Inc. | Textured irrigating sleeve |
| US5331951A (en) | 1992-09-04 | 1994-07-26 | American Cyanamid Company | Phacoemulsification probe drive circuit |
| US5342293A (en) | 1993-06-22 | 1994-08-30 | Allergan, Inc. | Variable vacuum/variable flow phacoemulsification method |
| US5865790A (en) | 1993-07-26 | 1999-02-02 | Surgijet, Inc. | Method and apparatus for thermal phacoemulsification by fluid throttling |
| US5591127A (en) | 1994-01-28 | 1997-01-07 | Barwick, Jr.; Billie J. | Phacoemulsification method and apparatus |
| DE69534254T2 (de) * | 1994-01-28 | 2005-10-27 | Advanced Medical Optics, Inc., Santa Ana | Vorrichtung zum Regeln des Spülens und Absaugens von Flüssigkeiten während der Augenchirurgie |
| US5431664A (en) * | 1994-04-28 | 1995-07-11 | Alcon Laboratories, Inc. | Method of tuning ultrasonic devices |
| US5569188A (en) | 1995-04-11 | 1996-10-29 | Mackool; Richard J. | Apparatus for controlling fluid flow through a surgical instrument and the temperature of an ultrasonic instrument |
| US5735858A (en) * | 1996-01-26 | 1998-04-07 | Allergan | IOL insertion apparatus and method for using same |
| US5766146A (en) | 1996-04-04 | 1998-06-16 | Allergan | Method of infusion control during phacoemulsification surgery |
| US5733256A (en) | 1996-09-26 | 1998-03-31 | Micro Medical Devices | Integrated phacoemulsification system |
| US5676649A (en) * | 1996-10-04 | 1997-10-14 | Alcon Laboratories, Inc. | Phacoemulsification cutting tip |
| US5808396A (en) * | 1996-12-18 | 1998-09-15 | Alcon Laboratories, Inc. | System and method for tuning and controlling an ultrasonic handpiece |
| US6394974B1 (en) * | 1997-01-22 | 2002-05-28 | Allergan Sales, Inc. | Power mode phaco |
| US6780165B2 (en) | 1997-01-22 | 2004-08-24 | Advanced Medical Optics | Micro-burst ultrasonic power delivery |
| US6629948B2 (en) | 1997-01-22 | 2003-10-07 | Advanced Medical Optics | Rapid pulse phaco power for burn free surgery |
| US5938677A (en) | 1997-10-15 | 1999-08-17 | Alcon Laboratories, Inc. | Control system for a phacoemulsification handpiece |
| US6283974B1 (en) * | 1997-11-14 | 2001-09-04 | Aaron James Alexander | Surgical tip for phacoemulsification |
| IT1299401B1 (it) * | 1998-03-27 | 2000-03-16 | Optikon 2000 Spa | Procedimento di ottimizzazione del pilotaggio di un attuatore piezoelettrico, in particolare per dispositivi facoemulsificatori, |
| US6179805B1 (en) * | 1998-06-04 | 2001-01-30 | Alcon Laboratories, Inc. | Liquefracture handpiece |
| US6315755B1 (en) | 1998-06-04 | 2001-11-13 | Alcon Manufacturing, Ltd. | Method of controlling a liquefracture handpiece |
| US6077285A (en) * | 1998-06-29 | 2000-06-20 | Alcon Laboratories, Inc. | Torsional ultrasound handpiece |
| US6028387A (en) * | 1998-06-29 | 2000-02-22 | Alcon Laboratories, Inc. | Ultrasonic handpiece tuning and controlling device |
| US6402769B1 (en) | 1998-06-29 | 2002-06-11 | Alcon Universal Ltd. | Torsional ultrasound handpiece |
| US6027515A (en) * | 1999-03-02 | 2000-02-22 | Sound Surgical Technologies Llc | Pulsed ultrasonic device and method |
| AU774545B2 (en) * | 1999-04-15 | 2004-07-01 | Ethicon Endo-Surgery, Inc. | Ultrasonic transducer with improved compressive loading |
| US6179808B1 (en) * | 1999-06-18 | 2001-01-30 | Alcon Laboratories, Inc. | Method of controlling the operating parameters of a surgical system |
| US6193683B1 (en) | 1999-07-28 | 2001-02-27 | Allergan | Closed loop temperature controlled phacoemulsification system to prevent corneal burns |
| US6261283B1 (en) | 1999-08-31 | 2001-07-17 | Alcon Universal Ltd. | Liquid venting surgical system and cassette |
| AU5943900A (en) * | 1999-11-29 | 2001-05-31 | Alcon Universal Limited | Torsional ultrasound handpiece |
| US6984220B2 (en) * | 2000-04-12 | 2006-01-10 | Wuchinich David G | Longitudinal-torsional ultrasonic tissue dissection |
| CA2385779A1 (en) * | 2000-08-29 | 2002-03-07 | Alcon Laboratories, Inc. | Method of controlling intraocular pressure and temperature |
| US6679899B2 (en) | 2000-10-20 | 2004-01-20 | Ethicon Endo-Surgery, Inc. | Method for detecting transverse vibrations in an ultrasonic hand piece |
| US7229455B2 (en) * | 2001-09-03 | 2007-06-12 | Olympus Corporation | Ultrasonic calculus treatment apparatus |
| US20040092921A1 (en) | 2002-10-21 | 2004-05-13 | Kadziauskas Kenneth E. | System and method for pulsed ultrasonic power delivery employing cavitation effects |
| US7316664B2 (en) * | 2002-10-21 | 2008-01-08 | Advanced Medical Optics, Inc. | Modulated pulsed ultrasonic power delivery system and method |
| US20040092800A1 (en) * | 2002-11-11 | 2004-05-13 | Mackool Richard J. | System for instructing removal of cataract tissue |
| US7297137B2 (en) | 2004-03-22 | 2007-11-20 | Alcon, Inc. | Method of detecting surgical events |
| US7645255B2 (en) | 2004-03-22 | 2010-01-12 | Alcon, Inc. | Method of controlling a surgical system based on irrigation flow |
| US7625388B2 (en) | 2004-03-22 | 2009-12-01 | Alcon, Inc. | Method of controlling a surgical system based on a load on the cutting tip of a handpiece |
| US20060041200A1 (en) * | 2004-06-04 | 2006-02-23 | Dotter James E | Physiological sensor device |
-
2005
- 2005-02-28 US US11/067,959 patent/US7645255B2/en active Active
- 2005-03-21 ES ES05731537T patent/ES2327053T3/es active Active
- 2005-03-21 BR BRPI0509072A patent/BRPI0509072B8/pt active IP Right Grant
- 2005-03-21 WO PCT/US2005/009273 patent/WO2005092022A2/en not_active Application Discontinuation
- 2005-03-21 JP JP2007505044A patent/JP4629726B2/ja active Active
- 2005-03-21 CA CA2559499A patent/CA2559499C/en active Active
- 2005-03-21 CN CNB2005800092905A patent/CN100558306C/zh active Active
- 2005-03-21 AU AU2005226682A patent/AU2005226682B2/en active Active
- 2005-03-21 AT AT05731537T patent/ATE433718T1/de not_active IP Right Cessation
- 2005-03-21 EP EP05731537A patent/EP1729658B1/en active Active
- 2005-03-21 DE DE602005014948T patent/DE602005014948D1/de active Active
- 2005-07-26 US US11/189,374 patent/US7758538B2/en active Active
-
2010
- 2010-01-06 US US12/683,191 patent/US8430838B2/en active Active
- 2010-06-03 US US12/793,293 patent/US8048020B2/en not_active Expired - Lifetime
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2001097728A1 (en) * | 1998-03-10 | 2001-12-27 | Advanced Medical Optics, Inc. | Phaco thermal control apparatus and method |
Also Published As
| Publication number | Publication date |
|---|---|
| DE602005014948D1 (de) | 2009-07-30 |
| US7645255B2 (en) | 2010-01-12 |
| CN101123917A (zh) | 2008-02-13 |
| ES2327053T3 (es) | 2009-10-23 |
| ATE433718T1 (de) | 2009-07-15 |
| EP1729658A4 (en) | 2007-07-18 |
| AU2005226682A1 (en) | 2005-10-06 |
| CA2559499C (en) | 2011-09-13 |
| US8048020B2 (en) | 2011-11-01 |
| JP2007530145A (ja) | 2007-11-01 |
| BRPI0509072B8 (pt) | 2021-06-22 |
| US7758538B2 (en) | 2010-07-20 |
| WO2005092022A2 (en) | 2005-10-06 |
| BRPI0509072A (pt) | 2007-08-21 |
| WO2005092022A3 (en) | 2007-01-04 |
| US8430838B2 (en) | 2013-04-30 |
| US20050267504A1 (en) | 2005-12-01 |
| CA2559499A1 (en) | 2005-10-06 |
| BRPI0509072B1 (pt) | 2017-12-12 |
| AU2005226682B2 (en) | 2008-11-13 |
| EP1729658A2 (en) | 2006-12-13 |
| US20050209621A1 (en) | 2005-09-22 |
| JP4629726B2 (ja) | 2011-02-09 |
| EP1729658B1 (en) | 2009-06-17 |
| US20100268388A1 (en) | 2010-10-21 |
| US20100130914A1 (en) | 2010-05-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100558306C (zh) | 基于冲洗流控制外科系统的系统 | |
| CN100592895C (zh) | 基于操作参数的改变率控制外科系统的方法及控制系统 | |
| CN101502460B (zh) | 根据手持设备的割尖上的负载控制手术系统的方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| TR01 | Transfer of patent right |
Effective date of registration: 20200420 Address after: Fribourg Patentee after: ALCON, Inc. Address before: Basel, Switzerland Patentee before: NOVARTIS AG Effective date of registration: 20200420 Address after: Basel, Switzerland Patentee after: NOVARTIS AG Address before: Humboldt, Switzerland Patentee before: ALCON, Inc. |
|
| TR01 | Transfer of patent right |