CN101535822A - 用于在探针卡组件中提供有效顺应性的方法及装置 - Google Patents
用于在探针卡组件中提供有效顺应性的方法及装置 Download PDFInfo
- Publication number
- CN101535822A CN101535822A CNA2007800410875A CN200780041087A CN101535822A CN 101535822 A CN101535822 A CN 101535822A CN A2007800410875 A CNA2007800410875 A CN A2007800410875A CN 200780041087 A CN200780041087 A CN 200780041087A CN 101535822 A CN101535822 A CN 101535822A
- Authority
- CN
- China
- Prior art keywords
- probe
- assembly
- compliance
- card assembly
- probe card
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/28—Testing of electronic circuits, e.g. by signal tracer
- G01R31/2851—Testing of integrated circuits [IC]
- G01R31/2886—Features relating to contacting the IC under test, e.g. probe heads; chucks
- G01R31/2891—Features relating to contacting the IC under test, e.g. probe heads; chucks related to sensing or controlling of force, position, temperature
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R1/00—Details of instruments or arrangements of the types included in groups G01R5/00 - G01R13/00 and G01R31/00
- G01R1/02—General constructional details
- G01R1/06—Measuring leads; Measuring probes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/26—Testing of individual semiconductor devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L22/00—Testing or measuring during manufacture or treatment; Reliability measurements, i.e. testing of parts without further processing to modify the parts as such; Structural arrangements therefor
Abstract
探针卡组件可包括第一顺应性来源以及第二顺应性来源。探针卡组件可进一步包括控制器,其可配置成在第一顺应性来源与第二顺应性来源之间分配对探针卡组件的总的顺应性需求。
Description
发明背景
图1A示出接触器件102,其可用来与电子器件106建立临时、基于压力的电连接。端子108与探针104之间的临时电连接可以通过将端子108压抵探针104和/或将探针104压抵端子108来建立。通常,探针104可以是顺应性的(即,柔性的并且因而能够在施加力后移动或转移)并且因而能够吸收由将端子108和探针104压在一起引起的力。
对于这种顺应性的需要可以由多个来源引起。
一种这样的来源是超程(over travel),其示例在图1B和1C中示出。如图1B所示,使电子器件106的输入和/或输出端108与接触器件102的导电探针104接触。位置110标识端子108与探针104之间的第一接触。如图1C所示,电子器件106通常移动超过端子108与探针104之间的第一接触110距离112,该距离112通常称为“超程”。超程尤其能够补偿探针104和端子108中的不规则性(例如,端子108高度的微小差异,端子108超出探针104的平面度等),并且确保探针104与端子108之间的电连接是足够导电的以使测试信号经由各个探针104可靠地输入到电子器件106的端子108。
与物理定律相符,包括相关联的力的超程必需被吸收或补偿。如所提及,通常接触器件102的可以是顺应性的探针104吸收大部分——即使不是全部的——超程。在图1C中,探针104示为被压缩,吸收大部分——即使不是所有的——超程112。在一些情况下,探针104的过压缩可损坏探针104和/或电子器件106。
引起对顺应性的需要的另一来源是端子108被压抵探针104时的接触器件102的热引起的移动。例如,热梯度可以在接触器件102上发展,这可导致接触器件102翘曲、弯曲、或者以其它方式移动,这可影响探针104与端子108之间的力的水平。
附图简述
图1A-1C示出具有用于与要测试的电子器件形成电连接的探针的接触器件。
图2示出根据本发明的一些实施例的示例性测试系统。
图3示出根据本发明的一些实施例的示例性执行器。
图4示出根据本发明的一些实施例的另一示例性执行器。
图5示出根据本发明的一些实施例的图2所示的示例性探针卡组件的探头组件。
图6示出表示由执行器和探针提供给图2中所示的探针卡组件的顺应性作用的虚拟弹簧。
图7示出根据本发明的一些实施例的图2中所示的控制器的示例性配置。
图8示出根据本发明的一些实施例的可由图7的控制器执行的示例性进程。
图9A-11B示出根据本发明的一些实施例的图8的进程的示例性实现。
图12A和12B示出根据本发明的一些实施例的图8的进程的另一示例性实现。
图13A-14B示出根据本发明的一些实施例的图8的进程的附加的示例性实现。
图15A和15B示出根据本发明的一些实施例的探头组件的示例性配置。
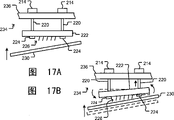
图16A-18C示出根据本发明的一些实施例的图8的进程的另外的示例性实现。
示例性实施例详述
本说明书描述本发明的示例性实施例和应用。然而,本发明不限于本文所描述的这些示例性实施例和应用或这些示例性实施例和应用操作的方式。而且,附图可以示出简化或部分视图,而且为了清楚起见附图中的元件尺寸可以放大或不成比例。此外,作为本文中使用的术语“在……上面”,一个物体(例如,材料,层,衬底等)可以在另一物体“上面”,而不管该物体是直接在另一物体上面或在该物体和另一物体之间有一个或多个中间插入物体。此外,方向(例如,上方,下方,上,下,侧,"x","y","z"等)——如果提供有——是相对的并且仅作为示例和便于说明和讨论而不是作为限制。
图2示出根据本发明的一些实施例的用于测试一个或多个电子器件230的示例性测试系统200的简化框图。(此后,要测试的一个或多个电子器件将被称为“待测器件”或“DUT”。此外,“待测器件”或“DUT”230可以是未单片化的半导体晶片的一个或多个管芯、从晶片单片化所得的一个或多个半导体管芯(已封装或未封装)、设置在载体或其它支持装置中的单片化半导体管芯阵列的一个或多个管芯、一个或多个多管芯电子模块、一个或多个印刷电路板、或者一个或多个任意其它类型的电子器件。此外,DUT可涉及一个或多个这种器件。
如所示,测试系统200可包括测试仪202,其可以是编程通用计算机、专用计算机、和/或其它电子设备或电子器件。测试仪202可配置成生成要被输入到DUT 230的测试信号,并且该测试仪202还可配置成接收并分析由DUT 230响应于测试信号生成的响应信号。
还如图2所示,测试系统200可以包括具有用于支持和移动DUT 230的可移动支持件232的外壳212。外壳212可以例如是诸如在测试半导体管芯时常用的探针,并且支持件232可以是夹盘或载物台。支持件232可配置成支持DUT 230并且还可配置成移动DUT 230。例如,支持件232可配置成在“x”、“y”和“z”方向移动DUT 230。支持件232能够进一步关于“x”、“y”轴倾斜DUT 230并且关于“z”轴旋转DUT 230。(图2中的“y”轴进出页面。为便于说明,“y”轴被示为略有歪斜。)
还如图2所示,测试系统200可包括探针卡组件234,其包括放置成接触并从而与DUT 230的输入和/或输出端子228电连接的导电探针226。如所示,探针卡组件234可附连到外壳212的安装板210,并且支持件232可沿“x、y”轴移动DUT 230以将各个端子228与各个探针226对准并且然后沿“z”轴移动DUT 230以使各个端子228与各个探针226接触。
如图2所示,探针卡组件234可包括安装结构236,布线基板208,柔性电连接器218、以及包括探针226的探头组件222。探针226可以是弹性导电结构。如美国专利No.5,476,211、美国专利No.5,917,707、以及美国专利No.6,336,269中所描述,合适的探针226的非限制性示例包括由用弹性材料外涂覆的接合到探头组件222上的导电端子(未示出)的核心电线构成的复合结构。探针226或者可以是诸如美国专利No.5,994,152、美国专利No.6,033,935、美国专利No.6,255,126、美国专利No.6,945,827、美国专利申请公开No.2001/0044225和美国专利申请公开No.2004/0016119中公开的弹簧元件之类的光刻形成结构。美国专利No.6,827,584、美国专利No.6,640,432、美国专利No.6,441,315和美国专利申请公开No.2001/0012739(P130-US)中公开了探针226的再一些其它非限制性示例。探针226的其它非限制性示例包括导电普克(pogo)插针、凸点、双头螺栓、冲压弹簧、针头、弯杆等。
布线基板208可包括从测试仪202到通信信道204的电接口(未示出)。通信信道204可提供多个单独的通信路径,用于从测试仪提供对DUT 230供电的功率和接地以及输入到DUT 230的测试信号,并且向测试仪提供由DUT230响应于测试信号生成的响应信号。各个通信信道204还可用来向或从探针卡组件234或外壳212内或上的其它器件(未示出)提供控制或状态信号。例如,各个通信信道可被用来控制支持件232的移动。通信信道204可尤其包括同轴电缆、光纤、无线发射机/接收机、开关、驱动和接收机、或者上述中的两个或更多个的组合。信道204与布线基板208之间的电接口(未示出)可包括与信道204电形成连接的任何适当装置。例如,该电气接口(未示出)可包括在布线基板208上的零插入力电连接器、普克插针垫等。
布线基板208可包括从信道204到柔性电连接器218的多个电气路径(未示出)。布线基板208可例如包括印刷电路板,并且电路径可包括在布线基板208上或内的导电迹线(未示出)以及穿过布线基板208的导电通孔(未示出)。
柔性电连接器218可提供从布线基板208到探头组件222的柔性导电路径(未示出)。如将讨论地,柔性电连接器218可包括足够柔性(或顺应性)以便于即使在探头组件222被执行器215移动时也能维持布线基板208与探头组件222之间的电连接的任何类型的电连接。例如,电连接器218可包括柔性布线。作为另一示例,电连接器218可包括插入机构(例如,如在美国专利No.5,974,622的图5中所公开的插入机构504)。
探头组件222可以包括通过探头组件222到探针226的导电路径(未示出)。通过布线基板208、柔性电连接器218、以及探头组件222的导电路径(未示出)因而能够提供各个信道204与各个探针226之间的单独的电连接,各个探针226又与各个DUT端子228形成电连接。
探头组件222可采用许多不同的形式和设计。例如,探头组件222可包括与探针226附连的单个基板。替换地,探头组件222可包括与探针226附连的多个探针基板(未示出),并且那些探针基板可附连到更大的基板(未示出)或者另外相互附连。2005年6月24日提交的美国专利申请S/N 11/165,833中公开了多基板探头组件222的示例。
安装结构236可包括刚性结构(例如,金属板结构)以及可附连到安装板210并从其脱离的一个或多个机构(未示出)。这些附连机构的非限制性示例包括螺栓、螺杆、夹具等。作为图2中所示的配置的替换,布线基板208(而非安装结构236)可被附连到安装板210。在这种配置中,安装结构236可作为加固结构被附连到布线基板208,或者安装结构236不需要被包括在探针卡组件234中。
如图2所示,探针卡组件234还可包括多个执行器215,其每个例如包括引擎214和驱动机构220。驱动机构220可以是可移动元件,并且引擎214可被配置成移动驱动机构220。引擎214可以是马达(例如,电动机)或者任何其它有能力移动驱动机构220的器件。(虽然三个执行器215在图2中示出,但是可使用更多或更少的执行器。)每个引擎214可选择性地将其相关联的驱动机构220驱动向探头组件222,或者将驱动机构220缩离探头组件222。引擎214可由控制信号238控制。每个执行器215可因而被选择性地控制成将探头组件的一部分移向或远离安装结构236。
图3示出根据本发明的一些实施例的其中驱动机构(220)可包括螺栓304的示例性执行器(215)。在图3中,安装结构236(其可包括金属板)在探头组件222的局部视图中示出。为便于说明,柔性电连接器218和布线基板208未在图3中示出。托架310可将探头组件222附连到安装结构236,并且弹簧312(示出一个但是可设置更多个)可使探头组件222偏向安装结构236。螺栓304可在所示的安装结构236中拧入螺纹插塞306(例如,螺纹衬套)。(螺纹插塞306可通过直接形成在安装结构236中的孔内的螺纹来代替)。相关联的引擎214可选择性地旋转螺栓304。在引擎214沿一个方向旋转螺栓304时,螺栓304可移向探头组件222并且压抵探头组件222,使探头组件222抵靠弹簧213的偏置力离开安装板236移动。相反地,在引擎214沿相反方向旋转螺栓304时,螺栓304可从探头组件222移动离开,使弹簧312的偏置力能将探头组件222推向安装结构236。
图4示出根据本发明的一些实施例的差动螺杆组件402和引擎214形式的示例性执行器(215)。如图3所示,安装结构236和探头组件222在局部视图中示出,并且柔性电连接器218和布线基板208未被示出。如图4所示,差动螺杆组件402可包括拧入外螺杆元件406的内螺杆元件404。外螺杆元件406自身可被拧入安装结构236中的螺纹孔410(或者螺纹插塞(例如,螺纹衬套)),并且内螺杆元件的一端可被拧入附连到探头组件222的双头螺栓元件408。替换地,内螺杆元件404可以被卡合、铜焊、焊接或者以其它方式附连到双头螺栓元件408。作为又一替换,内螺杆元件404和双头螺栓元件408可形成为一体。
相关联的引擎214可选择性地旋转外螺杆元件406。在外螺杆元件406沿一个方向旋转时,探头组件可被推离安装结构236,并且当外螺杆元件406沿相反方向旋转时,探头组件222可被推向安装结构236。
图3和4中所示的示例性执行器215仅仅是可用的许多可能的执行器的两个示例。其它非限制性示例包括具有变速箱的小螺距螺杆,气动执行器、热执行器、液压执行器、压电执行器、直线电机、音圈执行器螺线管(voce coil actuatorsolenoid)、磁致伸缩执行器(例如,铽镝铁磁致伸缩合金(terfenol-D)执行器)、驱动楔块系统的直线电机执行器、形状记忆合金(例如,镍钛合金)等。
参考图5(其仅示出探头组件222),不管执行器215的配置或类型如何,通过利用多个执行器215,力502可通过每个驱动机构220被选择性地施加到探头组件222的不同区域。还如图5所示,通过选择性地施加力502,探头组件222可沿“z”轴平移,和/或绕“x”轴和/或“y”轴关于安装结构236(参加图2)旋转。如果使用三个以上执行器215,则探头组件222可被弯曲或扭曲,或者其它移动也是可能的。
为了使用图2的测试系统200测试DUT 230,支持件232可将DUT 230的端子228与探针卡组件234的探针226对准。支持件232可通过将DUT 230通常沿“x”和“y”轴移动来这样做。支持件323然后可将DUT 230通常沿“z”轴移向探针卡组件234。与示出超程112的示例的以上关于图1A-1C的讨论一致,支持件232可沿“z”轴继续将DUT230移动超过端子228与探针226之间的第一接触一定距离,该距离通常称为超程距离。特定的测试场景可能需要端子228超过与探针226的第一接触的最小超程以补偿端子228和/或探针226中的不规则性以及端子228与探针226之间的取向不匹配(例如,探针226被取向在与其中取向端子228的平面不同的平面)。超程以及其它因素(例如热梯度)可对探针卡组件234有总的顺应性需求,该总的顺应性需求可必然需要被探针卡组件234吸收。探针226可以是弹性弹簧状探针,并且可因而吸收超程中的至少一些。然而,根据探针226的大小和材料成分,探针226可能不是足够坚固来提供对探针卡组件234的总的顺应性需求。例如,总超程可将探针226压缩超过探针226的弹性极限。作为另一示例,探针卡组件234的热引起的移动可将对探针卡组件的总顺应性需求推出探针226的弹性极限。
仍参考图2,根据本发明的一些实施例,探针卡组件234可包括传感器224(虽然示出一个但可使用更多个(例如,在一些实施例中,可使用三个或更多个)),该传感器224被配置成感测表示对探针卡组件234的顺应性需求的一个或更多个参数(例如,由DUT端子228超过与探针226的第一接触的超程引起的,由热梯度或负载引起的探针卡组件的翘曲、弯曲或其它移动),并且探针卡组件还可包括控制器216,其配置成控制执行器215的一个或多个的移动,并且因而移动探针卡组件222以便于将顺应性需求的一部分分配给探头组件222通过执行器215的移动。从另一角度来说,执行器215的移动提供第二顺应性来源,其与探针226(其可被说成提供第一顺应性来源)一起满足对探针卡组件234的总的顺应性需求。
图6示出两个串联的虚拟弹簧602、604的示例性示意图。由这两个虚拟弹簧602、604提供的顺应性的总和可表示由于以上讨论的任意因素(例如,超程、热移动、负载等)引起的对探针卡组件234的总的顺应性需求。虚拟弹簧602可表示由执行器215在控制器216的控制下移动探头组件222时提供的顺应性作用。虚拟弹簧604可表示探针226的顺应性作用,正如可见地它比总的顺应性需求小由执行器215提供的顺应性的量(由虚拟弹簧602表示)。
如所提及地,传感器224可被配置成感测表示对探针卡组件234的顺应性需求的一个或多个参数。例如,传感器224可感测被施加到探头组件222的力的水平。力传感器的一个示例是应变仪。一个或多个应变仪可被放置在一个或多个探针226上或附近并且被配置成产生与在探针226的一个或多个上的力的水平成比例或有关的一个或多个输出信号。作为另一示例,一个或多个力传感器可被配置成感测由探头组件222(例如,响应于被压抵探针226的DUT端子228)施加到执行器215的一个或多个的力。作为力传感器的又一示例,力传感器可被配置成产生与执行器215的阻力操作成比例或有关的输出信号。然而,传感器224不需要是力传感器。适当的传感器224的其它示例包括用于感测探头组件222的各部分与DUT 230的相应部分之间的距离的传感器。这些距离可与探针226中或上的力相关。距离传感器的示例包括电容式传感器和气隙传感器。适当的传感器224的再其它示例包括用于确定DUT端子228与位于探头组件222的特定区域上的各个特定探针226之间的接触的传感器。上述传感器中的一些可以是非线性的。例如,电容式传感器可以是非线性的。
如图2所示,由传感器224生成的信号240可被输出到控制器216。控制器216可被配置成确定对探针卡组件234的总的顺应性需求,并且控制器216可被配置成将总的顺应性需求的一部分分派给探头组件222的通过执行器215的移动。控制器216可以然后向执行器215输出控制信号238以移动驱动机构220,该驱动机构220又移动探头组件222,从而将总的顺应性需求的一些分派给探头组件222通过执行器215的移动。
例如,控制器216可被配置成确定总的顺应性需求是否超过阈值(例如,探针226可安全地提供的最大量顺应性)。作为另一示例,控制器216可被配置成确定对探针卡组件234的总的顺应性需求,并且控制器216可被配置成将总的顺应性需求的一部分(例如,顺应性的预定程度,总顺应性的预定百分比等)分配给探针226,并且可将控制信号238输出给引擎214以移动执行器215,该执行器215进而移动探头组件222,从而提供总的顺应性需求的另一部分(例如,未分派给探针226的部分)。控制器216可因而被配置成在探针226与探头组件222的移动之间分配总的顺应性需求。图7示出根据本发明的一些实施例的控制器216的示例性配置。如所示,控制器216可包括处理器702,其可以是配置成在可被存储在存储器706中的软件的控制下操作的处理器702。(如在此所使用地,术语“软件”包括但不限于软件、固件、微码、或者任何其它可由诸如处理器702之类的处理器执行的机器可读码。)处理器702和存储器706可被与在软件控制下操作的处理器702执行相同或类似的功能的硬连线逻辑电路代替。作为另一替换,处理器702可包括硬连线逻辑并且可在硬连线逻辑和软件的控制下操作。控制器216还可包括传感器输入模块708,该传感器输入模块708被配置成接收由传感器224中的一个或多个输出的一个或多个信号240(示出三个但可使用更多或更少),并且控制器216可包括执行器控制模块704,该执行器控制模块704配置成向执行器215输出一个或多个控制信号238(示出三个但是可使用更多或更少)。如所示,控制器216还可包括用于其它输入和/或输出信号712的总输入/输出模块710。其它模块和特征(未示出)也可被包括在内。
图7仅是示例性的,并且控制器216的其它配置是可能的。例如,控制器216可包括配置成形成气动计算系统的气动元件。
图8示出根据本发明的一些实施例的可由控制器216实现的示例性进程800。该进程800可在类似测试系统200的测试系统中测试类似DUT 230的DUT期间执行。为便于讨论和说明,将在此关于在测试系统200中测试DUT 230讨论进程800,虽然进程800可以在其它测试系统中测试其它DUT期间实现。
可实现进程800的DUT 230的测试期间可如下。DUT 230可被放置在图2的测试系统200的外壳212中的支持件232上,该支持件232可按需沿“x,y”轴移动DUT 230以使各个DUT端子228与各个探针226对准。如以上所讨论地,支持件232可然后通常沿“z”轴将DUT 230向探针226移动超过端子228与探针226之间的第一接触达超程距离。该接触可建立探针226与端子228之间的电连接。测试仪可然后生成经由信道204和探针卡组件234提供给DUT230的测试信号。由DUT 230响应于测试信号生成的响应信号可通过探针卡组件234和信道204提供给测试仪202,测试仪202可分析响应信号以确定DUT230是否正常工作。在测试之前,一个或多个初始化程序(未示出)可以在测试系统上或内执行,并且这些初始化程序可包括测试程序在减速或全速下的最初部分或全部运行。
在开始前述测试之前或之后,控制器216可开始进程800并且在测试期间继续执行进程800。在802,控制器216可监控对探针卡组件234的顺应性需求。控制器26可采用由传感器224生成的输出信号240这样做。在804,控制器216可确定是否将顺应性需求的一些分配给探头组件222通过执行器215的移动。换言之,控制器216可确定是否通过移动探头组件222来减小对探针226的总的顺应性需求。从另一角度来说,执行器215的移动可提供第二顺应性来源,其可与探针226(其可被说成提供第一顺应性来源)一起满足对探针卡组件234的总的顺应性需求。
控制器216可以若干可能的方式中的任意一种执行804。例如,控制器216可确定顺应性需求是否超过阈值。阈值可被设置成探针226可安全地满足而没有损坏探针226的严重危险的最大顺应性需求。阈值可因而取决于探针226的设计和构造、组成探针226的材料,或者诸如强度、弹性、回弹力、弹簧值等与探针226有关的其它参数。该阈值可替换地或附加地取决于探针226的电特性。例如,阈值可直接或间接地取决于探针22中的一个或多个的测得接触电阻。
作为控制器216可如何确定是否在804分配顺应性的另一示例,控制器216可配置成在804将在802确定的总的顺应性需求的预定百分比分配给探针226。如以上一般讨论地,总的顺应性需求的剩余部分可被分配给移动探头222。作为另一替换,控制器216可分配总的顺应性需求的预定百分比给移动探头222。作为又一些替换,控制器216可被配置成在804分配顺应性的预定程度给探针226或者移动探头组件222并且在804将总的顺应性需求的余量分配给探针226或探头组件222中的另一个。如果控制器216被配置成将总的顺应性需求的百分比或预定量分配给探针226或移动探头组件222,则图8的进程800可被配置成总是根据804的“是”确定而分支。
如果控制器216在804确定分配在步骤802监控到的顺应性需求,则控制器216在806可向执行器215输出控制信号238以移动探头组件222,从而在探针22与移动探头组件222(其可有效地减少否则将置于探针226上的顺应性需求)之间分配在802确定的总的顺应性需求。如以上所讨论地,执行器215可因而被驱动以移动探头组件222并且因而提供对探针卡组件234的总的顺应性需求的一部分。探针226因而仅需要提供探针卡组件234所需的总的顺应性的一部分。如以上参考图6所讨论地,探针226仅需要提供总的顺应性需求(其在图6中表示为虚拟弹簧602、604的总和)的一部分,即由虚拟弹簧604表示的部分。这是因为执行器215可提供由虚拟弹簧602表示的顺应性的一部分。从另一角度来说,执行器215的移动提供第二顺应性来源,其与探针226(其可被说成提供第一顺应性来源)一起满足对探针卡组件234的总的顺应性需求。
再次参考图8的进程800,在808,进程800可返回以重复802、804、806,这些可被重复任意次数。替换地,在808,进程800可结束。任何数目的标准可被用来确定在808是否结束进程800。例如,进程800可以在电连接在探针226与DUT端子228之间建立之后如上所述地通过将DUT端子228移动超出与探针226的最初接触达超程来结束。在这种情况下,执行器215可被用来提供吸收该超程所需的一些顺应性。
作为另一示例,进程800可继续整个DUT 230的测试。在808的结束确定可因而与测试DUT 230的结束一致。在这种情况下,进程800(以及执行器215)可响应于除DUT端子228的超过与探针226的第一接触超程以外的情况提供附加的顺应性。例如,在探针卡组件234上的温度梯度在测试期间可变,这可引起探针卡组件的热引起的移动(例如,翘曲),这可改变对探针卡组件的顺应性需求。这样的改变可在802、804被检测并在806被补偿。作为在808用于结束进程800的标准的又一示例,在808结束的确定可基于信号,诸如在用户激活停止过程时产生的结束信号。
有许多种控制器216可以在802监控顺应性需求、在804确定是否将顺应性需求的一些分配给执行器215,以及在806驱动执行器215分配顺应性需求的方法。图9A-12B示出非限制性示例。
图9A和9B示出压缩距离与力的示例性曲线图,其可表示在执行图8的进程800的802、804、806时的控制器216的示例性操作。
在图9A中,竖轴830(标记为压缩距离)可表示探针226被压缩的距离,并且横轴832(标记为力)可表示探针226上的相应力。一般根据胡克定律(Hooke′s law),线段833可表示探针226的通常响应(例如,f=k*d,其中f是施加在探针226上的力,k是探针226的弹簧常数,d是压缩距离(沿轴830),并且*表示乘法)。图10示出示例。如图10所示,探针226(其在图10中示意性地表示为线但在实践中可采用许多真实形状)被示为处于未压缩状态,且它们的端(例如,尖)位于由线d0表示的平面或近似平面内。(与线d0相对应的平面可延伸到图10的页面内外。)在图10中,处于压缩状态的探针226用虚线示出,并且它们的端位于由线d1表示的平面或近似平面内。(与线d1相对应的平面可延伸到图10的页面内外。)图10中的距离d1可以是与图9A中的竖轴830相对应的压缩距离d1,并且探针226上的合力可以是与图9A中的横轴832相对应的力f1。
在一非限制性示例中,控制器216可被编程成根据图9A中所示的线段835执行图8的进程800的802、804、806。在一个或多个探针226上的力小于图9A中标记为fon的力时,控制器216可被配置成不驱动执行器215,并且探针226可一般根据胡克定律(例如,根据线段833)通常类似于弹簧地动作。即,当一个或多个探针226上的力小于在图9A中标记为fon的力时,探针226的压缩距离以及探针226上的合力可如由线段833所示地相互成比例地改变。然而,一旦探针226中的一个或多个上的力超过fon,控制器216就可配置成驱动执行器215以移动探头组件222。根据图9A中所示的示例,控制器216可配置成根据线段835驱动执行器215。
上述的示例在图11A和11B中示出。当探针226从d0的压缩距离(即,没有压缩)被压缩到don的压缩距离时,探针226如图11A所示地根据胡克定律(例如,根据图9A中的线段833)类似于弹簧地压缩。如图11B所示,如果探针226上的力超过fon,则控制器216可控制执行器215并且使执行器215沿压缩的方向移动探头组件222。在图11B中,探头组件222从初始位置H0被移到位置H1。
从压抵探针226的DUT(例如,DUT230)的观点来看,图9B示出探针226和执行器215的操作的组合响应。在图9B中,复合线837可表示图9A中的线段833和835的总和。因为图9A中的线段835的830轴值对于小于fon的力为零,所以图9B的复合线837的第一段834与图9A中的线段833相对应,线段833与探针236通过它们自身的响应相对应。复合线837的第二段836是图9A中的线段833和835的总和,并且表示探针236根据图9A的线段833与执行器215根据图9A的线段835的操作的组合响应。在图9B中所示的特定非限制性示例中,线段835的斜率(或者换言之执行器215的控制)可被选择,以使探针226上的力超过fon的几乎所有或任何增大由探头组件222沿探针226的压缩方向的相应移动来补偿,从而探针226上的力仅稍微增大,该力在探针226上可近似为恒力。然而,可选择其它斜率用于线段835,这可导致复合线837的第二段836的不同的相应斜率。
说明执行器215的示例性控制的函数(由图9A中的线段835表示)仅是示例性的,并且许多其它函数可适用于由线段835表示的函数。图12A和12B说明其中复合函数(由图12A中的复合线1202表示,其包括第一段1204和第二段1206)表示执行器215的控制的示例。在图12A中,线段833与图9A中的相同并且表示如上所讨论的探针226本身根据胡克定律的响应。
参考图12A中的复合线1202(其如以上所讨论地表示执行器215的控制),在探针226上的力小于fon时,控制器216可配置成不激活执行器215。在探针226上的力在fon与f1之间时,控制器216可配置成控制执行器215根据第一段1204移动探头组件222。例如,控制器216可配置成对于探针226上的力fΔ1中的每一单位改变使探头组件222移动与dΔ1相对应的距离。在探针226上的力大于f1时,控制器216可配置成根据第二段1206控制执行器215。例如,控制器216可配置成对于探针226上的力fΔ2中的每一单位改变使探头组件222移动与dΔ2相对应的距离。
从压抵探针226的DUT(例如,DUT 230)的观点来看,图12B示出探针226和执行器215的操作的组合响应。在图12B中,复合线1208可表示图12A中的线段833和复合线1202的总和。因为图12A中的复合线1202的830轴值对于小于fon的力为零,所以图12B中的复合线1208的第一段1210可与图12A中的线段833相对应,线段833如以上所讨论地可与探针236通过它们自身的响应相对应。复合线1208的第二段1212是图12A中的线段833和第一段1204的总和,并且可表示当力在fon与f1时探针236根据图12A的线段833与执行器215根据图12A的第一线段1204的操作的组合响应。复合线1208的第三段1214是图12A中的线段833和第二段1206的总和,并且可表示当力大于f1时探针236根据图12A的线段833与执行器215根据图12A的第二线段1206的操作的组合响应。
许多其它函数(包括但不限于指数函数)可代替由图9A中的线段835或图12A中的复合线1202表示的函数。
在图9-12B中所示的示例中,图8的进程800的802、804、806可总体上关于探头组件222执行。替换地,进程800的802、804、806可关于探头组件222的多个部分单独执行。例如,如以下参考图15A和15B所讨论地,探头组件222可被分成各部分,并且可为每个部分设置一个或多个传感器224以及一个或多个执行器215。如将所见,图15示出其中与探针226附连的探头组件222的表面被分成各部分1102、1104、1106、1108(在图15A和15B中示出四个,但是该表面可被分成更多或更少的部分);可向每个部分1102、1104、1106、1108提供传感器224;以及还可向每个部分1102、1104、1106、1108提供驱动机构220的非限制性示例。在这种情况下,图8的进程800的802、804、806可对每个部分1102、1104、1106、1108单独地或同时地执行。
图13A-14B以及16A-18B示出图8的进程800的802、804、806的若干非限制性的附加示例或操作。为便于说明,在图13A-14B和16A-17B中,探针卡组件234在局部视图中示出。更具体地,安装结构236在局部视图中示出,并且柔性电连接器218以及布线基板208未示出。控制器216以及信号238和240也未示出。
图13A和13B示出根据本发明的一些实施例的示例性方式,其中如关于图8的进程800以上所讨论地,控制器216可以在802监控顺应性需求,在804确定是否向执行器215分配一些顺应性需求,以及在806驱动执行器215分配顺应性需求。在图13A和13B中,传感器240(虽然示出一个传感器240,但是可使用更多个)可包括配置成检测探针226中的一个或多个上的力的量的应变仪。控制器216可通过接收由传感器224输出的信号240(参见图2)执行图8的802,信号240可与探针226上的力的水平成比例或与其函数地相关(例如,输出可不与力的水平线性地成比例)。控制器216可按以上关于804讨论的方式中的任何一种执行804。例如,控制器216可配置成确定在802确定的总的顺应性需求是否超过预定阈值。在一示例中,控制器216可通过将由信号240指示的力的水平与存储器706中存储的阈值力进行比较(参见图7)来执行图8的804。阈值力可被预选择为可安全地施加到探针226的最大力,即可施加到探针226而没有损坏探针226的严重危险的最大力。这种最大力可通过在实验室环境中测试探针、经由基于探针的已知设计参数的计算或者以其它方式来确定。作为其中控制器216可在804确定是否分配总的顺应性需求的方式的另一示例,控制器26可配置成在804将在802确定的总的顺应性需求的固定百分比分配给探针226。作为另一示例性替换,控制器216可配置成将总的顺应性需求的固定百分比分配给移动探头222。从另一角度来说,控制器216可配置成在804将顺应性的预定程度分配给探针226或者移动探头组件222并且在804将总的顺应性需求的余量分配给探针226或探头组件222中的另一个。
在图13A和13B中所示的示例中,控制器216可以在806输出控制信号238,控制信号238可使执行器215将探头组件222充分移离DUT 230(如图13B所示)从而将在802确定的总的顺应性需求的一部分分配给移动探头组件222。例如,如果控制器在804通过确定总的顺应性需求是否超过阈值来确定是否分配总的顺应性需求,则控制器216可以在806输出致使执行器215将探针226上的力减小到阈值力的控制信号238。控制器216可通过使引擎214移动探头组件222直到控制器216确定探针226上的力等于或小于阈值力水平来这样做。替换地,控制器226可以计算探头组件222可被移动以将探针226上的力减小到阈值的距离并且使引擎214将探头组件222移动该距离。这样的计算可通过使用诸如探针的弹簧常数之类的探针226的各种参数来进行。如果在804基于除总的顺应性需求是否超过阈值之外的标准(例如,以上所讨论的替换技术中的任何一个)作出确定,则控制器216可以在806输出可使执行器215将探头组件222移离DUT 230(如图13B所示地)直到与标准有关的一个或多个参数满足要求的控制信号238。
图13A和13B中的传感器224可以是不同于配置成检测探针226上的力的水平的应变仪。例如,传感器224可配置成检测探头组件222与DUT 230之间的距离,该距离可用来确定或近似探针226上的力。用于检测探头组件222与DUT之间的距离的适当的传感器224的示例包括但不限于电容式传感器、气压计(气隙)传感器(air gage(gap)sensor)、线性可变位移传感器以及电感式传感器。
图14A和14B示出根据本发明的一些实施例的另一示例性方式,其中如以上关于图8的进程800所讨论地,控制器216可以在802监控顺应性需求,在804确定是否向执行器215分配一些顺应性需求,以及在806驱动执行器215分配顺应性需求。在图14A和14B中,传感器224可包括多个传感器,所述多个传感器放置在探头组件222上的不同位置并且配置成检测探头组件上的不同位置的探针226中的一个或多个上的力的量或位移。适当的传感器的示例可包括以上参考图13A和13B讨论的传感器224的示例中的任何一个。替换地或附加地,探针226中的一个或多个可以配置成传感器。
控制器216可通过接收由传感器224输出的信号240(参见图2)来执行图8的802,信号240与探头组件222上的不同位置的探针226上的力的水平或位移成比例。控制器216可通过确定在探头组件222上的不同位置的力或位移的不平衡何时超过预定不平衡来执行图8的804。在图14A和11B中所示的示例中,控制器216可以在806输出控制信号238,所述控制信号238使引擎214关于安装结构236改变探头组件222的取向(例如,倾斜)以使力或位移平衡(如图14B所示)。
图13A、13B以及图14A、14B中所示的示例可被组合。在这样的组合中,控制器216可如以上参考图14A和14B讨论地在802监控在探头组件222上的不同位置的探针226上的力。在804,控制器可如以上参考图13A和13B所讨论地确定力中的任何一个是否超过阈值,并且控制器216还可如以上参考图14A和14B讨论地确定在探头组件222上的不同位置的探针226上的力中的不平衡是否超过阈值不平衡。在806,控制器806可向引擎214输出控制信号238以如以上参考图13A和10B所讨论地按需移动执行器215以将力减小到阈值(或小于阈值),并且如以上参考图14A和14B所讨论地平衡各力。
在图16A-18B所示的示例中,探头组件222可被分成各部分,并且可为每个部分设置传感器222以及驱动机构220。非限制性示例在图15A(其示出探头组件222的仰视图)和图15B(其示出探头组件222的立体图)中示出。如图15A所示,与探针226附连的探头组件222的表面可被分成部分1102、1104、1106、1108(在图15A和15B中示出四个,但是该表面可被分成更多或更少个部分)。如图15A所示,可为每个部分1102、1104、1106、1108设置传感器224。如图15B所示,还可为每个部分1102、1104、1106、1108设置一个或多个驱动机构220。通过执行器215的选择性移动,探头组件222可如图15B所示地绕“x”和“y”轴旋转并且沿“z”轴关于安装结构236(参见图2)平移。此外,探头组件222可以通过执行器215的选择性移动被扭曲(例如,与探针226附连的探头组件222的表面的形状可被改变)。在图16A-17B所示的示例中,探头组件222可如图15A和15B所示地配置。即,探头组件222可被分成各部分(例如,像1102、1104、1106、1108),并且可为每个部分设置传感器224和驱动机构220。
如上所述,图16A-16C示出根据本发明的一些实施例的又一示例性方式,其中控制器216可以在802监控顺应性需求,在804确定是否向执行器215分配一些顺应性需求,以及在806驱动执行器215分配顺应性需求。如以上关于图8的进程800所讨论地。传感器224可被放置在探头组件222的每个部分(例如,像1102、1104、1106、1108)中,并且可输出与探头组件222的特定部分和DUT 230之间的距离成比例的信号240。在DUT 230被移向探针226时(例如,DUT 230可被放置在图2中的支持件232上,并且支持件232可将DUT 230移向探针226),控制器216可以从由传感器224产生的信号240确定DUT 230关于探头组件222偏离取向(例如,倾斜)的程度(这可以是图8中的802的示例)。(参见图16A)。如果取向误差的程度超过所需最大的取向误差(其可以是图8中的804的示例),则控制器216可向引擎214生成输出信号238,所述输出信号238使执行器215中的一个或多个移动探头组件222的与其相关联的部分以将探头组件222的取向改变为更类似如图16B和16C中所示的DUT230的取向(其可以是图8的示例806)。如图16C所示,探头组件222可以在DUT 230接触探针226时与DUT 230接近地取向。将探头组件222取向到DUT 230可通过减小需用来补偿DUT 230关于探头组件222的取向误差的顺应性来减小否则已为探针卡组件234(且更具体地探针226)所需要的顺应性需求。即,通过减小或消除探头组件222与DUT 230之间的取向误差,补偿取向误差所需的顺应性量被减小或消除。
图17A-17C中所示的示例可以与图16A-16C中所示的示例大致类似,除了传感器224检测探头组件的一部分中的探针226与DUT 230之间的接触。在操作中,控制器216可配置成在与探头组件222的特定部分(例如,像部分1102、1104、1106、1108)相关联的传感器224输出指示该部分中的探针226与DUT 230之间的最初接触时使与该部分相关联的驱动机构220将那个部分拉离DUT 230。控制器216可配置成继续这样做直到所有部分中的探针226已接触DUT 230。结果与图16A-16C中的示例中的结果大致相同:在DUT 230被移动成与探针226接触时,控制器216输出控制信号238,所述控制信号238使执行器215将探头组件222取向到DUT 230的取向。
图18A-18C中所示的示例可与图17A-17C中所示的示例大致类似,除了探头组件222(与DUT 230相对)被移动以实现探针226与DUT 230之间的接触。在操作中,控制器216可如图18A所示地配置成使所有的执行器215将探头组件222移向DUT 230。当在特定部分(例如,像部分1102、1104、1106、1108)中的传感器224输出指示在其部分中的探针226已接触DUT 230的信号240,并且控制器216可使与那个部分相关联的驱动机构220停止。然而,其它执行器215继续将探头组件222移向DUT 230直到它们的部分中的传感器224输出指示在它们的部分中的探针226已接触DUT 230的信号240。结果与图16A-16C以及图17A-17C中的示例中的结果大致相同:在探针226与DUT 230接触时,探头组件222自身按DUT 230的取向进行取向。
图16A-16C、图17A-17C、以及图18A-18C中所示的示例中的任何一个可使用传感器224配置,传感器224输出与传感器224相关联的部分(例如,像1102、1104、1106、1108)中的探针上的力成比例的信号240。控制器216可确定部分中的力何时超过阈值并且可向与该部分相关联的驱动机构220输出移动该部分并将力减小到阈值的控制信号238。
虽然在本说明书中描述了本发明的特定实施例和应用,但这不是为了使本发明限于本文所描述的这些典型实施例和应用或其中这些典型实施例和应用工作的方式。
Claims (33)
1.一种探针卡组件,包括:
第一顺应性来源;
第二顺应性来源;以及
控制器,所述控制器被配置成在所述第一顺应性来源与所述第二顺应性来源之间分配对所述探针卡组件的总的顺应性需求。
2.如权利要求1所述的探针卡组件,其特征在于:
所述第一顺应性来源包括多个放置在探头组件上并配置成与要测试的电子器件接触的多个探针;以及
所述第二顺应性来源包括配置成响应于来自所述控制器的控制信号改变所述探头组件的位置的执行器。
3.如权利要求2所述的探针卡组件,其特征在于,所述控制器配置成响应于与所述总的顺应性需求相对应的信号控制所述执行器。
4.如权利要求3所述的探针卡组件,其特征在于,还包括传感器,所述传感器配置成感测与所述总的顺应性需求有关的参数并生成与所述探针卡组件的顺应性需求相对应的信号。
5.如权利要求4所述的探针卡组件,其特征在于:
由所述传感器生成的信号与所述探针的至少一个上的力的水平相对应,以及
所述控制器配置成控制所述执行器以减小所述力的水平。
6.如权利要求5所述的探针卡组件,其特征在于,所述控制器配置成在所述力的水平超过预定阈值时控制所述执行器减小所述力的水平。
7.如权利要求5所述的探针卡组件,其特征在于,还包括多个执行器,其中:
所述传感器被进一步配置成感测所述探头组件的多个部分中的各个探针上的多个力,并且生成与所述力相对应的多个信号;以及
所述控制器进一步配置成单独控制每个执行器以单独减小与特定部分相关联的力之一的水平。
8.如权利要求4所述的探针卡组件,其特征在于,由所述传感器提供的信号与所述探针关于所述要测试的电子器件的取向有关。
9.如权利要求4所述的探针卡组件,其特征在于,所述传感器包括多个传感器,所述多个传感器的每一个配置成提供与所述探头组件的一部分和所述要测试的电子器件的相应部分之间的距离有关的信号。
10.如权利要求9所述的探针卡组件,其特征在于,还包括多个执行器,其中所述执行器的每一个配置成选择性地移动所述探针卡组件的一部分。
11.如权利要求4所述的探针卡组件,其特征在于,所述传感器包括多个传感器,所述多个传感器的每一个配置成提供指示所述探针之一与所述要测试的电子器件之间的接触的信号。
12.如权利要求4所述的探针卡组件,其特征在于,所述执行器是机器驱动的并且所述控制器接收来自所述传感器的信号作为输入并且输出控制信号用于驱动所述执行器。
13.如权利要求2所述的探针卡组件,其特征在于,所述要测试的电子器件包括多个半导体管芯。
14.一种制造探针卡组件的方法,所述方法包括:
配置附连到探头组件的多个探针以响应于所述探针与要测试的电子器件之间的接触提供第一顺应性来源;
配置传感器以生成与所述探针卡组件的总的顺应性需求有关的信号;
配置执行器以响应于所述控制信号选择性地移动所述探头组件;以及
配置控制器以接收由所述传感器生成的信号作为输入并且向所述执行器输出所述控制信号以提供第二顺应性来源。
15.如权利要求14所述的方法,其特征在于,配置所述控制器进一步包括配置所述控制器以输出所述控制信号来移动所述执行器,从而提供所述第二顺应性来源,所述第二顺应性来源的量与所述第一顺应性来源足以满足所述探针卡组件的顺应性需求。
16.如权利要求14所述的方法,其特征在于:
配置所述传感器包括配置所述传感器以生成与所述探针的至少一个上的力相对应的所述信号;以及
配置所述控制器包括配置所述控制器以生成所述控制信号,从而使所述执行器移动所述探头组件以将所述力减小到预定阈值。
17.如权利要求14所述的方法,其特征在于,还包括:
配置多个传感器以提供与所述探头组件的各部分和所述电子器件的相应各部分之间的关系有关的信号;
配置多个执行器中的每一个以向所述探头组件的各部分之一施加力;以及
配置所述控制器包括配置所述控制器以接收来自所述传感器的信号作为输入,并且生成控制信号作为输出用于驱动所述执行器。
18.一种使用探针卡组件的方法,所述方法包括:
测试电子器件,其中所述测试包括使所述探针卡组件的探针与所述电子器件的端子接触,其中所述探针是弹性的并且响应于所述探针与所述端子之间的接触提供第一顺应性来源;以及
在所述测试期间:
监控所述探针卡组件的顺应性需求,以及
改变所述探针关于所述电子器件的位置以提供第二顺应性来源,所述第二顺应性来源与所述第一顺应性来源组合足以满足所述探针卡组件的顺应性需求。
19.如权利要求18所述的方法,其特征在于,所述测试进一步包括通过各个所述探针向所述电子器件提供测试信号。
20.如权利要求18所述的方法,其特征在于:
所述监控包括监控所述探针之一上的力,以及
所述改变包括改变所述探针关于所述电子器件的位置以减小所述力。
21.如权利要求20所述的方法,其特征在于,所述改变包括在所述力超过阈值时改变所述探针关于所述电子器件的位置。
22.如权利要求18所述的方法,其特征在于:
所述监控包括监控多个所述探针上的多个力,以及
所述改变包括移动与所述探针附连的探头组件的一个或多个所选部分以平衡多个力。
23.如权利要求18所述的方法,其特征在于:
所述监控包括在使所述电子器件与所述探针卡组件接触时确定所述探针的取向与所述电子器件的取向之间的差异,以及
所述改变包括在所述差异超过阈值时选择性地移动所述探头组件的一个或多个部分以减小所述差异。
24.如权利要求23所述的方法,其特征在于,所述改变包括在所述差异超过阈值时选择性地移动所述探头组件的一个或多个部分。
25.如权利要求18所述的方法,其特征在于,所述改变包括激活至少一个执行器。
26.如权利要求18所述的方法,其特征在于:
所述监控包括确定与所述探针附连的探头组件的各部分与所述电子器件的相应各部分之间的距离,以及
确定各个所述距离之间的差异是否超过阈值。
27.如权利要求20所述的方法,其特征在于,所述改变包括将所述至少一个力施加到所述探头组件的至少一个部分以减小所述差异。
28.如权利要求18所述的方法,其特征在于,所述使接触包括移动所述探针卡组件。
29.如权利要求18所述的方法,其特征在于,所述电子器件包括多个半导体管芯。
30.一种探针卡组件,包括:
探头组件,所述探头组件包括在电子器件的端子被压抵并移动超过与探针的第一接触一超程距离时放置成与所述端子形成电连接的多个探针,其中所述探针是弹性的并且提供第一顺应性来源;以及
移动装置,所述移动装置用于移动所述探头组件以提供第二顺应性来源。
31.如权利要求30所述的探针卡组件,其特征在于,所述移动装置包括:
多个传感器;
多个执行器;以及
控制器,所述控制器被配置成根据来自所述传感器的信号控制所述执行器。
32.如权利要求31所述的探针卡组件,其特征在于,所述传感器包括每一个都配置成产生与所述探针之一上的力相对应的信号的器件。
33.如权利要求31所述的探针卡组件,其特征在于,所述传感器包括每一个都配置成产生与所述探头组件的一部分和所述电子器件的相应部分之间的距离相对应的信号的器件。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/555,567 | 2006-11-01 | ||
| US11/555,567 US7825675B2 (en) | 2006-11-01 | 2006-11-01 | Method and apparatus for providing active compliance in a probe card assembly |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN101535822A true CN101535822A (zh) | 2009-09-16 |
Family
ID=39364076
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNA2007800410875A Pending CN101535822A (zh) | 2006-11-01 | 2007-10-31 | 用于在探针卡组件中提供有效顺应性的方法及装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (2) | US7825675B2 (zh) |
| EP (1) | EP2080030A2 (zh) |
| JP (1) | JP5796933B2 (zh) |
| KR (1) | KR20090082446A (zh) |
| CN (1) | CN101535822A (zh) |
| TW (1) | TWI458984B (zh) |
| WO (1) | WO2008057897A2 (zh) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104508505A (zh) * | 2012-07-31 | 2015-04-08 | 东京毅力科创株式会社 | 使衬底与探针卡抵接的衬底抵接装置和具有衬底抵接装置的衬底检查装置 |
| CN110678759A (zh) * | 2017-05-30 | 2020-01-10 | 日本麦可罗尼克斯股份有限公司 | 电连接装置 |
| CN115308457A (zh) * | 2022-06-30 | 2022-11-08 | 上海泽丰半导体科技有限公司 | 用于高低温测试的探针卡制作方法及探针卡 |
| TWI827473B (zh) * | 2023-02-22 | 2023-12-21 | 鴻勁精密股份有限公司 | 電子元件作業機 |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7671614B2 (en) * | 2005-12-02 | 2010-03-02 | Formfactor, Inc. | Apparatus and method for adjusting an orientation of probes |
| US7825675B2 (en) * | 2006-11-01 | 2010-11-02 | Formfactor, Inc. | Method and apparatus for providing active compliance in a probe card assembly |
| US8528885B2 (en) * | 2008-04-21 | 2013-09-10 | Formfactor, Inc. | Multi-stage spring system |
| US8004296B2 (en) * | 2008-08-19 | 2011-08-23 | Centipede Systems, Inc. | Probe head apparatus for testing semiconductors |
| DE102008038184A1 (de) * | 2008-08-19 | 2010-02-25 | Suss Microtec Test Systems Gmbh | Verfahren und Vorrichtung zur temporären elektrischen Kontaktierung einer Solarzelle |
| TWI410637B (zh) * | 2009-09-17 | 2013-10-01 | Mpi Corp | 陣列式探針卡 |
| US7986157B1 (en) * | 2010-09-02 | 2011-07-26 | Star Technologies Inc. | High speed probing apparatus for semiconductor devices and probe stage for the same |
| US9702904B2 (en) * | 2011-03-21 | 2017-07-11 | Formfactor, Inc. | Non-linear vertical leaf spring |
| US9134357B1 (en) * | 2011-03-25 | 2015-09-15 | Maxim Integrated, Inc. | Universal direct docking at probe test |
| US8917105B2 (en) * | 2012-05-25 | 2014-12-23 | International Business Machines Corporation | Solder bump testing apparatus and methods of use |
| KR101415984B1 (ko) * | 2013-05-16 | 2014-07-09 | (주)에이젯 | 반도체 소자 테스트용 핸들러장치의 디바이스 컨택 제어방법 |
| JP2014002171A (ja) * | 2013-09-27 | 2014-01-09 | Tokyo Electron Ltd | プローブカード |
| DE102015109008B4 (de) * | 2015-06-08 | 2020-01-23 | Infineon Technologies Ag | Sonden-Anschlussflächen-Qualifikation |
| US10365323B2 (en) | 2015-11-25 | 2019-07-30 | Formfactor Beaverton, Inc. | Probe systems and methods for automatically maintaining alignment between a probe and a device under test during a temperature change |
| EP3258279A1 (en) * | 2016-06-16 | 2017-12-20 | Multitest elektronische Systeme GmbH | Pressing device and method of pressing a carrier against an electrical contact unit |
| TWI668457B (zh) * | 2018-08-27 | 2019-08-11 | 創意電子股份有限公司 | 檢測裝置 |
| US10809048B2 (en) * | 2019-01-08 | 2020-10-20 | Formfactor Beaverton, Inc. | Probe systems and methods for calibrating capacitive height sensing measurements |
| US11821918B1 (en) | 2020-04-24 | 2023-11-21 | Microfabrica Inc. | Buckling beam probe arrays and methods for making such arrays including forming probes with lateral positions matching guide plate hole positions |
| US11828775B1 (en) | 2020-05-13 | 2023-11-28 | Microfabrica Inc. | Vertical probe arrays and improved methods for making using temporary or permanent alignment structures for setting or maintaining probe-to-probe relationships |
| CN113454467A (zh) * | 2019-02-21 | 2021-09-28 | 维耶尔公司 | 用于微装置检验的探针结构 |
| US11768227B1 (en) | 2019-02-22 | 2023-09-26 | Microfabrica Inc. | Multi-layer probes having longitudinal axes and preferential probe bending axes that lie in planes that are nominally parallel to planes of probe layers |
| US11204383B2 (en) * | 2019-09-30 | 2021-12-21 | Formfactor, Inc. | Methods for maintaining gap spacing between an optical probe of a probe system and an optical device of a device under test, and probe systems that perform the methods |
| CN110793966B (zh) * | 2019-11-07 | 2022-03-04 | 哈尔滨工业大学 | 航空电连接器接触件缩针自动化检测装置及其检测方法 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03177039A (ja) * | 1989-12-05 | 1991-08-01 | Fujitsu Ltd | 半導体試験装置 |
| JP3163221B2 (ja) * | 1993-08-25 | 2001-05-08 | 東京エレクトロン株式会社 | プローブ装置 |
| US6246247B1 (en) * | 1994-11-15 | 2001-06-12 | Formfactor, Inc. | Probe card assembly and kit, and methods of using same |
| US6624648B2 (en) * | 1993-11-16 | 2003-09-23 | Formfactor, Inc. | Probe card assembly |
| US5974662A (en) | 1993-11-16 | 1999-11-02 | Formfactor, Inc. | Method of planarizing tips of probe elements of a probe card assembly |
| JPH0951023A (ja) * | 1995-08-04 | 1997-02-18 | Nippon Steel Corp | 半導体試験装置 |
| TW293938B (en) * | 1995-11-09 | 1996-12-21 | Formfactor Inc | Probe card assembly and kit, and methods of using same |
| KR100212169B1 (ko) * | 1996-02-13 | 1999-08-02 | 오쿠보 마사오 | 프로브, 프로브의 제조, 그리고 프로브를 사용한 수직동작형 프로브 카드 어셈블리 |
| JP3407192B2 (ja) * | 1998-12-31 | 2003-05-19 | 株式会社ダイトー | テストハンドの制御方法及び計測制御システム |
| JP2001110857A (ja) * | 1999-10-06 | 2001-04-20 | Tokyo Electron Ltd | プローブ方法及びプローブ装置 |
| US6509751B1 (en) * | 2000-03-17 | 2003-01-21 | Formfactor, Inc. | Planarizer for a semiconductor contactor |
| US7262611B2 (en) * | 2000-03-17 | 2007-08-28 | Formfactor, Inc. | Apparatuses and methods for planarizing a semiconductor contactor |
| US6441629B1 (en) * | 2000-05-31 | 2002-08-27 | Advantest Corp | Probe contact system having planarity adjustment mechanism |
| DE10039336C2 (de) * | 2000-08-04 | 2003-12-11 | Infineon Technologies Ag | Verfahren zum Testen von Halbleiterschaltungen und Testvorrichtung zur Durchführung des Verfahrens |
| US6841991B2 (en) * | 2002-08-29 | 2005-01-11 | Micron Technology, Inc. | Planarity diagnostic system, E.G., for microelectronic component test systems |
| US7084650B2 (en) * | 2002-12-16 | 2006-08-01 | Formfactor, Inc. | Apparatus and method for limiting over travel in a probe card assembly |
| US7385411B2 (en) | 2004-08-31 | 2008-06-10 | Formfactor, Inc. | Method of designing a probe card apparatus with desired compliance characteristics |
| US7545147B2 (en) * | 2004-08-31 | 2009-06-09 | Eaglepicher Technologies, Llc | System and method for nondestructive testing of thermal batteries |
| US7671614B2 (en) * | 2005-12-02 | 2010-03-02 | Formfactor, Inc. | Apparatus and method for adjusting an orientation of probes |
| US7688085B2 (en) | 2006-06-13 | 2010-03-30 | Formfactor, Inc. | Contactor having a global spring structure and methods of making and using the contactor |
| US7825675B2 (en) | 2006-11-01 | 2010-11-02 | Formfactor, Inc. | Method and apparatus for providing active compliance in a probe card assembly |
-
2006
- 2006-11-01 US US11/555,567 patent/US7825675B2/en not_active Expired - Fee Related
-
2007
- 2007-10-31 EP EP07844794A patent/EP2080030A2/en not_active Withdrawn
- 2007-10-31 WO PCT/US2007/083264 patent/WO2008057897A2/en active Application Filing
- 2007-10-31 CN CNA2007800410875A patent/CN101535822A/zh active Pending
- 2007-10-31 JP JP2009535458A patent/JP5796933B2/ja not_active Expired - Fee Related
- 2007-10-31 KR KR1020097011126A patent/KR20090082446A/ko not_active Application Discontinuation
- 2007-10-31 TW TW096140966A patent/TWI458984B/zh not_active IP Right Cessation
-
2010
- 2010-11-02 US US12/938,164 patent/US8513965B2/en not_active Expired - Fee Related
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104508505A (zh) * | 2012-07-31 | 2015-04-08 | 东京毅力科创株式会社 | 使衬底与探针卡抵接的衬底抵接装置和具有衬底抵接装置的衬底检查装置 |
| CN110678759A (zh) * | 2017-05-30 | 2020-01-10 | 日本麦可罗尼克斯股份有限公司 | 电连接装置 |
| CN110678759B (zh) * | 2017-05-30 | 2022-11-08 | 日本麦可罗尼克斯股份有限公司 | 电连接装置 |
| CN115308457A (zh) * | 2022-06-30 | 2022-11-08 | 上海泽丰半导体科技有限公司 | 用于高低温测试的探针卡制作方法及探针卡 |
| CN115308457B (zh) * | 2022-06-30 | 2023-12-22 | 上海泽丰半导体科技有限公司 | 用于高低温测试的探针卡制作方法及探针卡 |
| TWI827473B (zh) * | 2023-02-22 | 2023-12-21 | 鴻勁精密股份有限公司 | 電子元件作業機 |
Also Published As
| Publication number | Publication date |
|---|---|
| TWI458984B (zh) | 2014-11-01 |
| WO2008057897A3 (en) | 2008-12-11 |
| EP2080030A2 (en) | 2009-07-22 |
| TW200831908A (en) | 2008-08-01 |
| KR20090082446A (ko) | 2009-07-30 |
| US20080100312A1 (en) | 2008-05-01 |
| US7825675B2 (en) | 2010-11-02 |
| US8513965B2 (en) | 2013-08-20 |
| US20110043240A1 (en) | 2011-02-24 |
| JP2010508533A (ja) | 2010-03-18 |
| JP5796933B2 (ja) | 2015-10-21 |
| WO2008057897A2 (en) | 2008-05-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101535822A (zh) | 用于在探针卡组件中提供有效顺应性的方法及装置 | |
| JP6255914B2 (ja) | 検査治具 | |
| US7671614B2 (en) | Apparatus and method for adjusting an orientation of probes | |
| EP3076124B1 (en) | Tactile probing system | |
| US7868632B2 (en) | Composite motion probing | |
| CN107063655A (zh) | 万向架组件测试系统及方法 | |
| JP2006329836A (ja) | 測定用コンタクト端子、測定装置、プローブカードセット、ウエハプローバ装置、及び試験装置 | |
| KR20150088262A (ko) | 안내공 내에서의 원치않은 이동을 저지하는 스프링 기구를 구비한 프로브 | |
| CN108414017B (zh) | 一种用于电连接器插拔模拟试验装置及试验方法 | |
| JPS62220822A (ja) | ピエゾ抵抗型力測定要素 | |
| US10948367B2 (en) | Input interface device with semiconductor strain gage | |
| CN113075045A (zh) | 一种实现应力和刚度协调控制的真三轴试验机及控制方法 | |
| US6690284B2 (en) | Method of controlling IC handler and control system using the same | |
| KR101277205B1 (ko) | 핸드폰 카메라의 액츄에이터 검사장치 | |
| CN113316873B (zh) | 用于检查压接质量的方法及设备 | |
| Riegel et al. | Analysis of the stress state in QFN package during four bending experiment utilizing piezoresistive stress sensor | |
| US5963039A (en) | Testing attachment reliability of devices | |
| JP2003315196A (ja) | 圧力センサの製造方法およびその製造方法に用いる測定装置 | |
| KR102001468B1 (ko) | 전기 접속 장치 | |
| US20090097526A1 (en) | Reliability testing of sub-miniature interconnects | |
| LU504977B1 (en) | True triaxial testing machine for realizing constant stiffness and control method | |
| JP6058325B2 (ja) | 基板検査装置および基板検査方法 | |
| KR102548942B1 (ko) | 멀티 핀 테스트장치 | |
| JP5443791B2 (ja) | 荷重検出センサおよび荷重検出センサの製造方法 | |
| JPH06347483A (ja) | 多ピン接触子およびその製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Open date: 20090916 |