CN101583530B - 具有可动臂件的机器人履带车 - Google Patents
具有可动臂件的机器人履带车 Download PDFInfo
- Publication number
- CN101583530B CN101583530B CN2007800497385A CN200780049738A CN101583530B CN 101583530 B CN101583530 B CN 101583530B CN 2007800497385 A CN2007800497385 A CN 2007800497385A CN 200780049738 A CN200780049738 A CN 200780049738A CN 101583530 B CN101583530 B CN 101583530B
- Authority
- CN
- China
- Prior art keywords
- frame
- robotic crawler
- arm
- rack unit
- arm spare
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000009471 action Effects 0.000 claims description 14
- 238000000034 method Methods 0.000 claims description 13
- 238000005452 bending Methods 0.000 claims description 5
- 230000036544 posture Effects 0.000 description 9
- 230000009194 climbing Effects 0.000 description 6
- 230000004048 modification Effects 0.000 description 5
- 238000012986 modification Methods 0.000 description 5
- WYTGDNHDOZPMIW-RCBQFDQVSA-N alstonine Natural products C1=CC2=C3C=CC=CC3=NC2=C2N1C[C@H]1[C@H](C)OC=C(C(=O)OC)[C@H]1C2 WYTGDNHDOZPMIW-RCBQFDQVSA-N 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 241000282326 Felis catus Species 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 208000012661 Dyskinesia Diseases 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 239000012141 concentrate Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000012797 qualification Methods 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 238000012876 topography Methods 0.000 description 1
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D55/00—Endless track vehicles
- B62D55/06—Endless track vehicles with tracks without ground wheels
- B62D55/065—Multi-track vehicles, i.e. more than two tracks
- B62D55/0655—Articulated endless track vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D55/00—Endless track vehicles
- B62D55/06—Endless track vehicles with tracks without ground wheels
- B62D55/075—Tracked vehicles for ascending or descending stairs, steep slopes or vertical surfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D57/00—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track
- B62D57/02—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track with ground-engaging propulsion means, e.g. walking members
- B62D57/024—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track with ground-engaging propulsion means, e.g. walking members specially adapted for moving on inclined or vertical surfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D57/00—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track
- B62D57/02—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track with ground-engaging propulsion means, e.g. walking members
- B62D57/028—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track with ground-engaging propulsion means, e.g. walking members having wheels and mechanical legs
Abstract
本发明涉及一种机器人履带车,该履带车能实现多种运动模式。在一个实施例中,机器人履带车(10)包括至少一个机架单元(10),该机架单元具有可旋转地联接于其上的连续履带(14)。至少一个铰接臂件(18a,18b)设置在至少一个机架单元上,臂件相对于机架单元可在至少一维中运动。铰接臂件有助于提高机器人履带车在各种环境中的机动性。
Description
相关申请
本申请要求享有于2006年11月13日向美国专利商标局提交的标题为“Tracked Robotic Crawler Having A Movable Arm”(具有可动臂件的机器人履带车)的美国临时专利申请No.60/858,915的权益,该申请的全文引用在此作为参考。
技术领域
本发明涉及小型无人驾驶的地面机器人车辆,更具体地,本发明涉及具有至少一个可动臂件的机器人履带车。
背景技术
机器人学是活跃的研究领域,已研制出许多不同类型的机器人车辆用于各种任务。例如,无人驾驶的飞行器已非常成功地用于军事空中侦察。然而,无人驾驶的地面车辆获得较少成功,这部分地是由于在地面环境中运动显著地比在空中环境中运动困难。
无人驾驶地面车辆当试图实现机动性时会面临许多挑战。地形的变化很广泛,例如包括松散和易变的材料、障碍物、植被、有限宽度或高度的开口、台阶等。优化用于在一种环境中运行的车辆可能在另一种环境中运行不佳。
还有一些与车辆的尺寸有关的折衷方案。大型车辆可以更好地处理某些障碍物,例如台阶、落差、间隙等。另一方面,大型车辆不能容易地通过狭窄的通道或者在管道内部行进,且更容易被植物阻挡。大型车辆还往往更容易被看到,并因此不太希望用于独立的监视应用。相比之下,尽管小型车辆更独立,但越过障碍变成更大的行驶问题。
各种各样的机动性构造已经适合于通过困难的地形。这些选择方案包括腿、车轮和履带。有腿的机器人可能是灵活的,但采用复杂的控制机构来移动和达到稳定性。轮式车辆可以提供高度机动性,但提供有限的附着作用并需要宽度以便得到稳定性。
履带式车辆是已知的,且通常构造成坦克构型。尽管履带式车辆在某些环境中可以提供高度稳定性,但履带式车辆在车辆很小的情况下通常提供有限的可操纵性。此外,已知的履带式车辆不能适应在宽范围内变化的障碍,尤其是当地形狭窄并且道路弯曲时。
发明内容
本发明包括一种机器人履带车,该履带车帮助克服现有技术中固有的问题和不足。机器人履带车包括至少一个机架单元,该机架单元具有可旋转地联接到机架单元的连续履带,该连续履带的至少一个表面露出以便能与表面接合,从而推进机架单元。至少一个臂件设置在机架单元上。该臂件可相对于机架单元运动。
附图说明
从下文结合附图的描述和所附权利要求中可以更清楚地看到本发明。应当理解,这些附图仅描述了本发明的示例性实施例,它们不应当被认为是对本发明的范围的限制。可以容易地认识到,文中一般性地描述以及在附图中示出的本发明的部件可布置成或设计成各种不同的构造。但是下面将通过附图更加详细和具体地描述和解释本发明,其中:
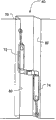
图1示出按照本发明示例性实施例的机器人履带车的透视图;
图2示出图1的机器人履带车的示意图;
图3示出按照本发明另一示例性实施例的机器人履带车的透视图;
图4示出按照本发明另一示例性实施例的机器人履带车的透视图;
图5示出图4的机器人履带车的示意图;
图6示出按照本发明实施例的处于跨越间隙的列车构型的机器人履带车的透视图;
图7示出按照本发明实施例的处于坦克构型的机器人履带车的透视图;
图8示出按照本发明实施例的处于外部爬升构型的机器人履带车的透视图;
图9(a)和9(b)示出按照本发明实施例的处于不同的内部爬升构型的机器人履带车的透视图;
图10(a)和10(b)示出按照本发明实施例的处于另外的不同的内部爬升构型的机器人履带车的透视图;
图11(a)-11(g)示出按照本发明实施例的爬升一组梯级的机器人履带车的运动顺序的侧视图;以及
图12示出按照本发明又一可选实施例的机器人履带车。
具体实施方式
下文对本发明的示例性实施例的详细描述参考了附图,该附图形成描述的一部分,在该附图中作为示例示出了本发明可实施的示例性实施例。尽管这些示例性实施例被充分详细地描述以使得本领域技术人员能够实施本发明,但应当理解可实现其他实施例且可在不脱离本发明的精神和范围的情况下对本发明作各种改变。因此,下文对本发明的实施例的更详细的描述并不用于限制所要求的本发明的范围,而仅仅为了进行举例说明且不限制对本发明的特点和特征的描述,以提出执行本发明的最佳方式,并足以使得本领域技术人员能够实施本发明。从而,本发明的范围仅由所附权利要求来限定。
下文对本发明的详细描述和示例实施例可结合附图来更好地理解,其中本发明的元件和特征由附图标记标识。
参见图1,图1示出的是按照本发明的第一示例性实施例的机器人履带车的例图。具体而言,图1将机器人履带车10示出为包括一机架单元12,该机架单元12具有连续履带14。如果需要,机架中可包括一个以上的连续履带。连续履带的至少一个表面16露出,以便能与表面接合,从而推进机架单元。至少两个铰接臂件18a、18b附装到机架单元的相对侧上。铰接臂件可在至少一维(one dimension)中相互独立地运动。例如,各铰接臂件可以安装在一共同的轴线20上,从而提供沿方向22的旋转运动。因此各铰接臂件可在平行于机架单元的侧面的平面中运动。换句话说,铰接臂件可在与机架单元的连续履带的旋转轴线垂直的平面中运动。机架单元可以基本上被包围在由连续履带的内表面限定的周边的内部,从而有助于保持小的外形。当然,应该理解,机架的一些部分可以沿横向延伸,以连接到机器人履带车的接头或其它部件上。可以使用铰接臂件的各种其它的布置,这将在下文说明。
铰接臂件可以用来帮助推进机器人履带车10。铰接臂件可以旋转到一例如伸出机架单元前端的位置,以例如帮助将机架单元的前端抬过障碍物。铰接臂件还可以旋转到收起位置(例如,如虚线18’所示),其中它们基本上包含在由连续履带的内表面11限定的周边内。
因此,当臂件收起时,得到小的轮廓,从而增加了机器人履带车通过狭窄的通道、通过植被障碍、并保持难以觉察的外观的能力。下面进一步详细说明各种其它的运动模式。
如图2示意性示出,机器人履带车10可以包括联接到连续履带14的履带驱动单元24,及分别联接到铰接臂件18a、18b的一个或多个臂件驱动单元26a、26b。履带驱动单元可以控制连续履带的运动,从而例如控制运动的方向(正向或向后)和速度。臂件驱动单元可以控制铰接臂件的运动。机器人履带车的推进可以包括连续履带和铰接臂件的协调运动,这将在下文进一步详细说明。
按照本发明的另一实施例,如图3所示,机器人履带车还可以包括多个机架单元。机器人履带车30包括以列车状布置按串联构造联接的多个机架单元12a、12b、12c。如上所述,各机架单元包括一连续履带14a、14b、14e。各机架单元通过接头32联接。例如,接头可以是被动式或驱动式接头。下面进一步详细讨论驱动式接头。
机架14中的一个或多个可以包括至少一个铰接臂件18。例如,一个有臂件的机架单元可具有一铰接臂件,而其它机架没有臂件。作为另一例子,各机架单元可以具有一个或多个臂件。作为又一例子,列车(构型)中的第一个和最后一个机架单元可以具有臂件,而中间的单元没有臂件。铰接臂件可以在不同的位置处连接到机架上,包括例如,靠近前部、靠近后部、及靠近中间。一个特别有用的实施例是,铰接臂件靠近机架单元的一端(例如,前端),而接头32连接在机架单元的另一端(例如,后端)附近。
尽管示出了三个机架单元,但可以用另一些接头将更多的机架单元联接在一起形成更长的列车。利用两个或多个串联联接的机架单元可以得到改善的机动性和灵活性,这将在下文进一步详细说明。
按照本发明的另一实施例,在图4中示出一种特殊的示例性机器人履带车。机器人履带车在图4中示出。机器人履带车40包括第一机架单元12a和第二机架单元12b,如上所述,各机架单元具有连续履带14a、14b。铰接臂件18a、18b、18c、18d在各机架单元上设置成对置的对。第一机架单元和第二机架单元通过驱动式联接件34联接。驱动式联接件提供绕至少一个轴线的可控的弯曲。例如,如图中所示,驱动式联接件可以包括提供绕七个不同的轴线弯曲的接头。这些接头包括提供绕偏转轴线42的弯曲的两个接头,提供绕俯仰轴线44的弯曲的两个接头,提供绕滚动轴线46的旋转的两个接头,以及一个附加的弯曲接头48。接头的这种特定的布置在机器人履带车可以采取的姿势方面提供了相当大的柔性。例如,引用在此作为参考的、共同所有并均处于审理中的、于2006年11月13日提交的标题为“Serpentine Robotic Crawler”(蛇形机器人履带车)的美国临时专利申请No.60/858,917描述了通过接头的该特定布置可实现的各种姿势和运动方式。
如图5中示意性示出,机器人履带车40包括分别联接到连续履带14a、14b的履带驱动单元24a、24b。还包括臂件驱动单元26a、26b。各个臂件驱动单元26a、26b分别控制一对臂件18a、18b和18c、18d;不过可供选择地,也可以为每个臂件提供单独的驱动单元。驱动控制系统36联接到驱动单元,以协调连续履带和臂件的运动,从而提供机器人履带车的推进。驱动式联接件34也可以联接到驱动控制系统,以协调机器人履带车的运动和姿势。
机器人履带车可采用各种运动模式和姿势。现在参照图4中所示的构型提供一些示例,不过应该认识到,本文所公开的其它构型也能应用一部分或全部下述运动模式。
第一姿势在文中称之为“列车”构型,其中第一机架12a和第二机架12b成一行设置,如图6所示。各机架可以是,但不是必须排成直线。列车构型提供小的轮廓,从而允许通过狭窄的通道和开口(例如,隧道60)。通过驱动连续履带14a、14b使得它们沿相同的相应方向运动,机器人履带车可以沿向前或向后的方向运动。可选地,可以驱动一个连续履带,而另一个连续履带以被动的方式离开。
臂件18可以展开,以伸出机架的端部,从而接触表面并为机器人履带车40提供附加的长度,例如如图6所示。增加的长度还提供附加的稳定性。这提高了机器人履带车越过间隙和孔(例如,峡谷62)的能力。
机器人履带车10的转动可以用各种方法完成。在一种模式中,可以操纵驱动式联接臂34,以在第一机架12a和第二机架12b之间形成一角度。在另一种模式中,一个或多个臂件18可以伸出以插入表面,从而提供一个(或多个)离心阻力点,当驱动连续履带14时,机架绕上述离心阻力点产生转矩。在另一模式中,可协调驱动式联接臂、臂件和履带的操作,以执行转动。
第二种姿势在文中称之为“坦克”构型,其中第一机架12a和第二机架12b并排设置,如图7所示。各机架可以是,但不是必须平行。例如当通过陡坡时,坦克构型为机器人履带车40提供横向稳定性。通过沿相同的相应方向驱动连续履带14a、14b,机器人履带车可以沿向前和向后的方向运动;通过沿相反的方向驱动连续履带,机器人履带车可以转动。通常,移动处于坦克构型的机器人履带车可以包括给连续履带施加不同的驱动速度(包括沿相反方向)。应该注意,相对于列车构型,一个连续履带的方向改变。在坦克构型中,臂件18可以伸出与表面接触,以提供附加的稳定性和/或附着作用。
机器人履带车还可以构造用于以外部爬升构型爬升结构的外部。如图8所示,机器人履带车40包围结构70,使得连续履带14的露出部分72、74彼此朝向,并接触所述结构的相对的外表面76、78。臂件18可以伸出机架12的端部以接触结构的外表面,从而提供附加的稳定性和/或附着作用。例如,臂件可以帮助将机器人履带车的中心保持在结构上。
连续履带可以被驱动,以沿所述结构上下移动机器人履带车。以这种外部爬升构型可以爬升许多不同的结构几何形状,包括例如柱。
机器人履带车还可以构造用于爬升结构的内部。图9(a)和9(b)示出两种不同的内部爬升构型。在内部爬升构型中,机器人履带车40构造成使得连续履带的露出部分72、74彼此背离,并与结构70的相对的内表面80、82接触。臂件可以伸出机架的端部,以便接触结构的内表面。臂件可以伸出机架端部,以接触所述结构的内表面。臂件可设置成接触与它们对应的连续履带相同的内表面,如图9(a)和9(b)所示。或者,臂件可以设置成接触相对的内表面,如图10(a)的可供选择的姿势所示。作为又一种可供选择的方案,如图10(b)所示,连续履带可朝向相同的方向与一个内表面80接触,而臂件可以接触相对的内表面82。在各种姿势中,臂件可以帮助增加连续履带和内表面之间的力,从而增加连续履带的附着作用。内部爬升构型可用于爬升管道、烟囱、墙壁内部等。
机器人履带车可进行各种不同的扭铰运动。例如,图11(a)-11(i)提供示出机器人履带车40爬升一组梯级86的例图的顺序的侧视图。如果机器人履带车不是已经处于列车构型,则该机器人履带车采用列车构型,如图11(a)所示。然后,机器人履带车将臂件旋转到一位置,其中前部臂件伸到第一机架的前方,如图11(b)所示。然后,前部臂件进一步旋转,以将第一机架的前部提起到悬离第一梯级,如图11(c)所示。后部臂件可以旋转以接触机器人履带车后面的表面,以提供附加的稳定性和/或附着作用。然后,可以向前驱动履带,以将机器人履带车向前移上第一梯级,如图11(d)所示。为了爬升下一梯级,前部臂件重复旋转工序。后部臂件也可以用来帮助升起第二机架,如图11(e)-11(g)所示。通常,臂件旋转,其中,臂件的末端当高于机架单元时朝行进方向旋转,而当低于机架单元时朝与行进方向相反的方向旋转。这种运动帮助臂件悬离障碍物,获得附着作用,并将机架单元提起并越过障碍物。因此,如果臂件驱动单元具有足够的力矩来提起机架单元的重量,则是有帮助的。或者,驱动式联接件34可以提供足够的力矩来提起第一机架单元的机架,同时由第二机架单元支承。应该认识到,机器人履带车可使用与爬升一组梯级类似的运动,以进入墙壁中的孔。根据要通过的梯级(或其它障碍物)的尺寸,扭铰运动的各种其它的组合可以证明是有帮助的。在本发明的实施例中可以应用的其它运动模式在上述标题为“蛇形机器人履带车”的申请中已有说明。
尽管上述讨论一般集中在铰接臂件的较简单的构型上,但也可以使用更复杂的构型。例如,铰接臂件可以包括多个铰接接头。例如,与驱动式联接件中所用的接头相类似的接头也可以用在铰接臂件中。各种不同的配件,如工具、摄像机等也可以固定到铰接臂件上。例如,图12示出按照本发明另一实施例的机器人履带车50。机器人履带车包括机架12a、12b,各机架具有履带14a、14b。联接到机架上的是接合臂件,所述接合臂件具有通过接头56a、56b连接在一起的下段52a、52b和上段54a、54b。各个接合臂件包括摄像机60a、60b。固定到各个臂件的末端上的是锯齿状刀刃62a、62b。
接合臂件可以用于多种用途。一种用途是支承摄像机60a、60b。下段52a、52b可以旋转,以升高或降低摄像机(例如,以增加高度从而提供更好的视野,或者降低高度从而提供更低的轮廓)。上段54a、54b可以旋转,以例如帮助推进,如上所述。锯齿状刀刃60a、60b可在例如如上所述爬梯级时帮助提供附着作用。
摄像机可以用来帮助导航。例如,前部摄像机60a可主要用于扫描环境,而后部摄像机60b可用于观察机器人履带车的姿势,以进行控制。
当然,各种其它的工具也可以固定到臂件的端部上,上述工具包括例如灯、夹具、钳子、操纵装置、切削刀、钻头、材料取样器、传感器等。各种传感器,包括例如,雷达、激光雷达、温度传感器、化学传感器、力传感器、运动检测器、扬声器、天线等,都可以使用。
在另一个实施例中,可以使用提供两个自由度的运动的臂件。第一自由度可以是例如如上所述在与固定到机架上的位置相切的平面中的旋转运动。第二自由度可以是与上述平面垂直的横向运动。例如,可以使用具有接头的臂件或者具有可控的顺应性的结构来提供横向运动。可控的顺应性可以通过在臂件上提供弹簧偏压得到,其中弹簧常数可在工作期间通过致动器改变。
通过横向移动臂件可实现各种不同的附加运动模式。例如,臂件可以向内偏转并伸到机器人履带车的前面,以形成尖的布置。这种姿势可以帮助机器人履带车通过障碍物如繁茂的植被。
作为另一个例子,例如当以外部爬升构型扣压在凸形外表面上时,臂件可以朝彼此向内偏转,以提高附着作用。例如当以内部爬升构型在凹形弯曲内表面上提供附着作用时,臂件也可以向外偏转。作为还有另一个例子,臂件可以向外偏转以形成外伸件,从而为机器人履带车提供附加的稳定性。
在某种程度上概括并重申,按照本发明实施例的机器人履带车可在各种应用和环境中使用。例如,但不作为限制,应用可以包括搜索和救援、军事活动和工业操作。机器人履带车可有助于避免需要将人暴露于危险的环境中,例如不稳定的建筑物、军事冲突情况、和化学、生物或核污染的环境中。机器人履带车的构造柔性提供多种运动模式。例如,以坦克构型运动可以提供高度稳定性。以列车构型运动可以穿过狭窄的通道或管道,并能跨过间隙。也可以爬升结构的外部(如柱子),以及爬升结构的内部(如烟囱)。还示出了爬梯级的情况。
在上文中结合具体的示例性实施例详细描述了本发明。但是,应当理解,可在不脱离由所附权利要求限定的本发明的范围的情况下进行各种修改和变型。详细的描述和附图应仅被认为是说明性的,而不是限制性的,如果存在任何这样的修改和变型,那么它们都将落入在此描述的本发明的范围内。
更具体地,尽管在此已经描述了本发明的示例性实施例,但是本发明并不局限于这些实施例,而是包括本领域技术人员根据前面的详细描述可认识到的经过修改、省略、(例如各个实施例之间的)组合、适应性改变和/或替换的任何和全部实施例。权利要求中的限定可根据权利要求中使用的语言而进行广泛的解释,且不限于在前述详细描述中或在实施该申请期间描述的示例,这些示例应被认为是非排他性的。例如,在本发明中,术语“优选地”不是排他性的,这里它的意思是“优选地,但是并不限于”。在任何方法或过程权利要求中列举的任何步骤可以以任何顺序执行并且不限于权利要求中提出的顺序。因此,本发明的范围应当仅由所附权利要求及其合法等同物来确定,而不是由上文给出的说明和示例来确定。
Claims (21)
1.一种机器人履带车,包括:
多个机架单元,各机架单元具有可旋转地联接到机架单元上的连续履带,其中连续履带的至少一个表面露出,以便能与一表面接合,从而推进机架单元;
至少一个驱动式联接件,该至少一个驱动式联接件以串联构型联接机架单元,其中,驱动式联接件具有至少一个驱动式接头,该驱动式接头构造用于提供绕至少一个轴线的可控的弯曲;以及
可独立运动的至少一个臂件,该至少一个臂件设置在多个机架单元中的一个上,以形成有臂件的机架单元,所述臂件可被驱动并且在至少一维中运动到不与用于推进的所述表面接触的位置。
2.如权利要求1所述的机器人履带车,其特征在于,各机架单元基本上包含在由它们的对应的连续履带的内表面限定的周边内。
3.如权利要求1所述的机器人履带车,其特征在于,至少一个臂件构造成使得能够运动到收起位置,在该收起位置,该至少一个臂件基本上包含在由对应的连续履带的内表面限定的周边内。
4.如权利要求1所述的机器人履带车,其特征在于,有臂件的机架单元包括:
联接到连续履带的第一驱动单元;
联接到至少一个臂件的第二驱动单元;以及
驱动控制系统,该驱动控制系统联接到第一和第二驱动单元,并构造用于使连续履带和至少一个臂件的运动相协调,以推进机器人履带车。
5.如权利要求4所述的机器人履带车,其特征在于,至少一个驱动式联接件联接到驱动控制系统,以协调机器人履带车的运动和姿势。
6.如权利要求1所述的机器人履带车,其特征在于,至少一个驱动式联接件具有足够的力矩以便能提升至少一个机架单元,同时由至少一个其余的机架单元支承。
7.如权利要求1所述的机器人履带车,其特征在于,至少一个臂件可以绕该臂件与有臂件的机架单元的连接点旋转。
8.如权利要求1所述的机器人履带车,其特征在于,至少一个臂件可在一与有臂件的机架单元的连续履带的旋转轴线基本垂直的两维平面中运动。
9.如权利要求1所述的机器人履带车,其特征在于,至少一个臂件联接到一驱动单元,该驱动单元具有足够的力矩,以便能提起有臂件的机架单元。
10.一种机器人履带车,包括:
机架单元,该机架单元仅具有单个可旋转地联接到机架上的连续履带,其中,连续履带的至少一个表面露出,以便能与一表面接合,从而推进机架单元;以及
设置在机架单元相对侧上的至少两个铰接臂件,该至少两个铰接臂件可被驱动并且在至少一维中相互独立地运动到不与用于推进的所述表面接触的位置。
11.一种在一表面上操纵机器人履带车的方法,包括下列步骤:
(a)提供第一机架和第二机架,各机架具有连续履带,连续履带具有用于与所述表面接合的露出区域,其中至少一个连续履带联接到驱动源,以提供连续履带的旋转;
(b)提供至少两个铰接臂件,臂件连接到第一机架和第二机架的每个上,各臂件可相对于彼此和相对于它们对应的机架独立地被驱动并且在至少一维中独立地运动到不与用于推进的所述表面接触的位置;
(c)提供联接在第一机架和第二机架之间的驱动式多自由度联接臂;以及
(d)协调连续履带的旋转、铰接臂件的运动、及多自由度联接臂的致动,以控制机器人履带车在所述表面上的姿势和运动。
12.如权利要求11所述的方法,其特征在于,步骤(d)包括将第一机架和第二机架设置成坦克构型,其中第一机架和第二机架并排且基本平行。
13.如权利要求12所述的方法,其特征在于,步骤(d)包括将铰接臂件设置成朝相同的方向伸出第一机架和第二机架的端部,以接触所述表面,由此为机器人履带车提供附加的稳定性和/或附着作用。
14.如权利要求11所述的方法,其特征在于,步骤(d)包括将第一机架和第二机架设置成列车构型,其中第一机架和第二机架首尾相连地排成一行。
15.如权利要求14所述的方法,其特征在于,步骤(d)包括将铰接臂件设置成伸出第一机架和第二机架的端部,以接触所述表面,由此为机器人履带车提供附加的稳定性和/或附着作用。
16.如权利要求11所述的方法,其特征在于,步骤(d)包括将第一机架和第二机架设置成外部爬升构型,其中第一机架和第二机架设置成使得连续履带的露出部分彼此面对,并与要爬升的结构的相对的外表面接触。
17.如权利要求16所述的方法,其特征在于,步骤(d)包括将铰接臂件设置成伸出第一机架和第二机架的端部,以接触结构的外表面,由此为机器人履带车提供附加的稳定性和/或附着作用。
18.如权利要求11所述的方法,其特征在于,步骤(d)包括将第一机架和第二机架设置成内部爬升构型,其中第一机架和第二机架设置成使得连续履带的露出部分彼此背离,且与要爬升的结构的相对的内表面接触。
19.如权利要求18所述的方法,其特征在于,步骤(d)包括将各机架单元上的铰接臂件设置在一位置,以与对应的连续履带的露出部分接触所述结构的相同的内表面,由此为机器人履带车提供附加的稳定性和/或附着作用。
20.如权利要求18所述的方法,其特征在于,步骤(d)包括将各机架单元上的铰接臂件设置在一位置,以与对应的连续履带的露出部分接触所述结构的相对的内表面,由此为机器人履带车提供附加的稳定性和/或附着作用。
21.如权利要求12所述的方法,其特征在于,步骤(d)包括:
将铰接臂件设置成朝向前的方向伸出第一机架和第二机架中的一个的端部;以及
使铰接臂件向内偏转以形成尖的构型。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US85891506P | 2006-11-13 | 2006-11-13 | |
| US60/858,915 | 2006-11-13 | ||
| PCT/US2007/023870 WO2008076193A2 (en) | 2006-11-13 | 2007-11-13 | Tracked robotic crawler having a moveable arm |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101583530A CN101583530A (zh) | 2009-11-18 |
| CN101583530B true CN101583530B (zh) | 2012-07-04 |
Family
ID=39494668
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2007800497385A Expired - Fee Related CN101583530B (zh) | 2006-11-13 | 2007-11-13 | 具有可动臂件的机器人履带车 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US8185241B2 (zh) |
| EP (2) | EP2099672B1 (zh) |
| JP (1) | JP5411702B2 (zh) |
| CN (1) | CN101583530B (zh) |
| AT (1) | ATE522431T1 (zh) |
| IL (1) | IL198711A (zh) |
| WO (1) | WO2008076193A2 (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107932473A (zh) * | 2012-07-27 | 2018-04-20 | 工程服务公司 | 具有柔性可展开尾部的移动机器人 |
Families Citing this family (72)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20080136254A1 (en) | 2006-11-13 | 2008-06-12 | Jacobsen Stephen C | Versatile endless track for lightweight mobile robots |
| DE602007013793D1 (de) | 2006-11-13 | 2011-05-19 | Raytheon Co | Anpassbare spuranordnung für einen raupenroboter |
| JP2010526590A (ja) | 2007-05-07 | 2010-08-05 | レイセオン・サルコス・エルエルシー | 複合構造物を製造するための方法 |
| US8571711B2 (en) | 2007-07-10 | 2013-10-29 | Raytheon Company | Modular robotic crawler |
| US10427290B2 (en) | 2017-07-18 | 2019-10-01 | General Electric Company | Crawler robot for in situ gap inspection |
| FR2929228B1 (fr) * | 2008-03-28 | 2010-06-18 | Thales Sa | Robot grimpeur de poteau. |
| US7954575B1 (en) * | 2008-09-10 | 2011-06-07 | Bloxsom Joel O | Leader string pull-through machine |
| US8525124B2 (en) | 2008-11-03 | 2013-09-03 | Redzone Robotics, Inc. | Device for pipe inspection and method of using same |
| US8392036B2 (en) | 2009-01-08 | 2013-03-05 | Raytheon Company | Point and go navigation system and method |
| WO2010144813A1 (en) * | 2009-06-11 | 2010-12-16 | Raytheon Sarcos, Llc | Method and system for deploying a surveillance network |
| KR101208919B1 (ko) * | 2010-03-25 | 2012-12-06 | 주식회사 유진로봇 | 레이크 휠이 장착된 구동암 및 이를 구비한 이동 로봇 |
| WO2012044663A1 (en) * | 2010-09-30 | 2012-04-05 | Schlee Keith L | Multi-unit mobile robot |
| US9522595B2 (en) | 2011-01-27 | 2016-12-20 | Irobot Defense Holdings, Inc. | Small unmanned ground vehicle |
| US9346499B2 (en) * | 2011-01-27 | 2016-05-24 | Irobot Corporation | Resilient wheel assemblies |
| AU2012214062B2 (en) * | 2011-02-11 | 2016-12-08 | University Of Regina | Adaptable vehicle |
| US20120205168A1 (en) * | 2011-02-11 | 2012-08-16 | Christopher Ryan Flynn | Robot reconfigurable for insertion through a narrow opening |
| CN102267503B (zh) * | 2011-05-06 | 2012-07-25 | 北京航空航天大学 | 一种由单体抛掷机器人组合而成的小型组合机器人 |
| JP5542092B2 (ja) * | 2011-05-12 | 2014-07-09 | 学校法人千葉工業大学 | 無人走行用移動体 |
| US9004200B2 (en) * | 2011-09-09 | 2015-04-14 | Pinhas Ben-Tzvi | Mobile robot with hybrid traction and mobility mechanism |
| US8574021B2 (en) | 2011-09-23 | 2013-11-05 | Mattel, Inc. | Foldable toy vehicles |
| JP2013113597A (ja) * | 2011-11-25 | 2013-06-10 | Hitachi-Ge Nuclear Energy Ltd | 調査ビークル、容器内の調査装置及び画像の処理方法 |
| US9248875B2 (en) | 2012-04-17 | 2016-02-02 | Robo-team Ltd. | Driving flipper with robotic arm |
| US8393422B1 (en) | 2012-05-25 | 2013-03-12 | Raytheon Company | Serpentine robotic crawler |
| DE102012109040B4 (de) * | 2012-09-25 | 2014-12-11 | BIBA - Bremer Institut für Produktion und Logistik GmbH | Klettervorrichtung und Verfahren zum Ausführen von Tätigkeiten an gestapelten Gegenständen |
| CN102887187A (zh) * | 2012-10-23 | 2013-01-23 | 四川省电力公司西昌电业局 | 一种电磁式智能攀爬机器人 |
| US9031698B2 (en) | 2012-10-31 | 2015-05-12 | Sarcos Lc | Serpentine robotic crawler |
| US9409292B2 (en) * | 2013-09-13 | 2016-08-09 | Sarcos Lc | Serpentine robotic crawler for performing dexterous operations |
| US9566711B2 (en) | 2014-03-04 | 2017-02-14 | Sarcos Lc | Coordinated robotic control |
| CN104002880B (zh) * | 2014-06-03 | 2016-03-23 | 东南大学 | 一种带有导臂的履带式移动机器人自主上下楼梯控制方法 |
| JP2014238403A (ja) * | 2014-07-07 | 2014-12-18 | 日立Geニュークリア・エナジー株式会社 | 調査ビークル、容器内の調査装置及び画像の処理方法 |
| US9096281B1 (en) * | 2014-07-30 | 2015-08-04 | Engineering Services Inc. | Dual mode mobile robot |
| US9561829B1 (en) * | 2014-09-03 | 2017-02-07 | X Development Llc | Robotic leg with multiple robotic feet |
| CN104647341B (zh) * | 2015-02-28 | 2016-04-06 | 东北大学 | 一种越障式无缆遥控排险侦查机器人 |
| RU2603816C1 (ru) * | 2015-06-24 | 2016-11-27 | Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования "Государственный университет - учебно-научно-производственный комплекс" (ФГБОУ ВПО "Госуниверситет-УНПК") | Транспортное средство |
| US10071303B2 (en) | 2015-08-26 | 2018-09-11 | Malibu Innovations, LLC | Mobilized cooler device with fork hanger assembly |
| US9637186B1 (en) | 2015-12-03 | 2017-05-02 | Engineering Services Inc. | Dual mode vehicle |
| GB2548917B (en) * | 2016-04-01 | 2020-08-05 | Provost Fellows Found Scholars & Other Members Board College Holy & Und | Obstacle crossing robot |
| US10807659B2 (en) | 2016-05-27 | 2020-10-20 | Joseph L. Pikulski | Motorized platforms |
| JP6715462B2 (ja) * | 2016-06-02 | 2020-07-01 | パナソニックIpマネジメント株式会社 | 移動ロボット |
| US10131057B2 (en) | 2016-09-20 | 2018-11-20 | Saudi Arabian Oil Company | Attachment mechanisms for stabilzation of subsea vehicles |
| US11608697B2 (en) * | 2016-11-21 | 2023-03-21 | Sam SCHROIT | System for the operational and performance efficiency improvement of wireline tractors |
| CN108340364B (zh) * | 2017-01-24 | 2020-09-15 | 南京原觉信息科技有限公司 | 爬行机器装置与其部署方法 |
| WO2018154424A1 (en) | 2017-02-21 | 2018-08-30 | Induna Robotics (Pty) Ltd | Robotic limb arrangement and associated robot |
| US10603802B2 (en) | 2017-07-18 | 2020-03-31 | General Electric Company | End region inspection module and method for in situ gap inspection robot system |
| US10427734B2 (en) * | 2017-07-18 | 2019-10-01 | General Electric Company | Omnidirectional traction module for a robot |
| US10596713B2 (en) | 2017-07-18 | 2020-03-24 | General Electric Company | Actuated sensor module and method for in situ gap inspection robots |
| US10434641B2 (en) | 2017-07-18 | 2019-10-08 | General Electric Company | In situ gap inspection robot system and method |
| CN107521576B (zh) * | 2017-08-24 | 2023-09-05 | 广州南洋理工职业学院 | 一种可地面行走及爬楼梯机器人 |
| CA3081665C (en) | 2017-09-19 | 2021-01-05 | Arix Technologies, Inc. | Pipe traversing apparatus and methods |
| CN107972755A (zh) * | 2017-12-27 | 2018-05-01 | 同方威视技术股份有限公司 | 集装箱爬壁机器人 |
| CN108188467B (zh) * | 2018-03-19 | 2024-04-09 | 江苏科技大学 | 一种用于波纹管切割的自走式装置 |
| US11247737B2 (en) * | 2018-04-23 | 2022-02-15 | Eagle Technology, Llc | UGV with adaptive stabilizer |
| US20200101804A1 (en) * | 2018-09-28 | 2020-04-02 | Beijing Jingdong Shangke Information Technology Co., Ltd. | Connector for connecting trailers in mobile robotic device and method of controlling the same |
| CN109533051B (zh) * | 2018-11-29 | 2020-09-18 | 北京理工大学 | 一种具有可折叠摆臂的翻转式爬楼梯机器人 |
| US11097796B2 (en) * | 2018-11-29 | 2021-08-24 | Saudi Arabian Oil Company | Articulated magnet-bearing legs for UAV landing on curved surfaces |
| CN109557173B (zh) * | 2019-01-17 | 2023-12-22 | 中国石油大学(北京) | 无损检测装置 |
| CN109911046B (zh) * | 2019-03-12 | 2023-12-15 | 无锡金诚工程技术服务有限公司 | 悬浮履带式爬索机器人 |
| CN109849018A (zh) * | 2019-04-04 | 2019-06-07 | 华夏天信(北京)智能低碳技术研究院有限公司 | 一种矿用救灾蛇形机器人 |
| CN110181534A (zh) * | 2019-06-24 | 2019-08-30 | 国网安徽省电力有限公司 | 一种攀爬机器人 |
| CN110328651A (zh) * | 2019-07-29 | 2019-10-15 | 东北大学 | 面向老人的可越障陪护机器人 |
| US11833674B2 (en) * | 2019-08-14 | 2023-12-05 | Honeybee Robotics, Llc | Bi-directional robotic crawler for transporting a sensor system about a structure |
| US11154989B2 (en) | 2019-09-27 | 2021-10-26 | Arix Technologies, Inc. | Pipe traversing apparatus, sensing, and controls |
| CN110789626B (zh) * | 2019-10-21 | 2021-09-14 | 陈迎高 | 一种折叠式磁吸附爬壁检测装置及其检测方法 |
| CN111267953B (zh) * | 2020-02-06 | 2021-03-16 | 北京中安吉泰科技有限公司 | 一种柔体爬壁机器人转向装置 |
| US10797473B1 (en) * | 2020-03-20 | 2020-10-06 | Smart Prototype, Inc. | Cable rod guiding device |
| US20220204100A1 (en) | 2020-12-31 | 2022-06-30 | Sarcos Corp. | Coupleable, Unmanned Ground Vehicles with Coordinated Control |
| US11754514B2 (en) | 2021-08-13 | 2023-09-12 | Arix Technologies, Inc. | Radiography inspection and fail-safe mechanism for pipe traversing robots |
| CN114295336B (zh) * | 2021-11-12 | 2023-06-06 | 国网宁夏电力有限公司吴忠供电公司 | 一种通过履带式行进的环形自动贴合的吊臂无损检测方法 |
| CN114794991B (zh) * | 2022-06-02 | 2024-01-16 | 南通大学 | 一种楼梯清洁机器人的不转身下楼梯控制方法 |
| CN115303380B (zh) * | 2022-10-12 | 2022-12-27 | 齐鲁工业大学 | 一种仿生爬壁巡检机器人 |
| CN116159318A (zh) * | 2022-12-09 | 2023-05-26 | 哈尔滨理工大学 | 一种使用三角履带底盘的武术擂台机器人 |
| CN117022472B (zh) * | 2023-10-08 | 2023-12-12 | 四川职业技术学院 | 一种快速翻越台阶消防救援机器人及控制方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5363935A (en) * | 1993-05-14 | 1994-11-15 | Carnegie Mellon University | Reconfigurable mobile vehicle with magnetic tracks |
| US5650579A (en) * | 1995-12-05 | 1997-07-22 | General Electric Company | Miniature air gap inspection crawler |
| DE20314213U1 (de) * | 2003-09-12 | 2003-11-20 | Ebisch Siegfried | Schreitender Roboter |
| WO2005082306A1 (de) * | 2004-02-27 | 2005-09-09 | Losch Airport Equipment Gmbh | Treppengängiges transportfahrzeug für rollstühle |
| EP1832501A2 (en) * | 2006-03-10 | 2007-09-12 | National Institute of Advanced Industrial Science and Technology | Crawler robot |
Family Cites Families (302)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US858917A (en) | 1907-03-19 | 1907-07-02 | Samuel Edgar Snedeker | Window-screen. |
| US1107874A (en) | 1911-11-06 | 1914-08-18 | Bullock Tractor Company | Vehicle. |
| US1112460A (en) | 1913-04-21 | 1914-10-06 | Harry W Leavitt | Tractor. |
| US1515756A (en) | 1922-05-12 | 1924-11-18 | Roy Irene | Articulated coupling device for heavy loads |
| GB392392A (en) | 1931-09-15 | 1933-05-18 | Leon Martinage | Improvements in and relating to endless track vehicles |
| US2025999A (en) | 1932-01-25 | 1935-12-31 | Edward C Myers | Rubber covered flexible track |
| US2082920A (en) | 1935-12-24 | 1937-06-08 | Aulmont W Tye | Trailer |
| US2129557A (en) | 1937-06-09 | 1938-09-06 | Charles H Beach | Detachable traction lug |
| US2312072A (en) | 1940-03-07 | 1943-02-23 | Tenger Victoria | Endless track for vehicles |
| US2345763A (en) | 1941-02-27 | 1944-04-04 | Goodrich Co B F | Flexible track for self-laying track vehicles |
| US2311475A (en) | 1941-09-19 | 1943-02-16 | Theodore G Schmeiser | Auxiliary traction wheel |
| US2329582A (en) | 1942-11-02 | 1943-09-14 | Harold M Bishop | Tread |
| US5570992A (en) | 1954-07-28 | 1996-11-05 | Lemelson; Jerome H. | Free-traveling manipulator with optical feedback control and methods |
| US2701169A (en) | 1954-08-18 | 1955-02-01 | Edgar M Cannon | Mud lug for endless traction track links |
| US2850147A (en) | 1954-08-20 | 1958-09-02 | James M Hill | Mobile curvable conveyor |
| US2933143A (en) | 1957-06-25 | 1960-04-19 | Canadair Ltd | Articulated vehicle |
| US3060972A (en) | 1957-08-22 | 1962-10-30 | Bausch & Lomb | Flexible tube structures |
| US3037571A (en) | 1959-08-17 | 1962-06-05 | Schield Bantam Company | Wide base crawler |
| US2967737A (en) | 1959-11-30 | 1961-01-10 | George V Moore | Detachable traction units |
| US3166138A (en) | 1961-10-26 | 1965-01-19 | Jr Edward D Dunn | Stair climbing conveyance |
| US3190286A (en) | 1961-10-31 | 1965-06-22 | Bausch & Lomb | Flexible viewing probe for endoscopic use |
| US3223462A (en) | 1963-04-25 | 1965-12-14 | Boeing Co | Endless track for a track laying vehicle |
| US3266059A (en) | 1963-06-19 | 1966-08-16 | North American Aviation Inc | Prestressed flexible joint for mechanical arms and the like |
| US3215219A (en) | 1963-07-22 | 1965-11-02 | Lockheed Aircraft Corp | Articulated vehicle |
| DE1505007B2 (de) | 1965-02-11 | 1976-07-22 | Eisen- Und Drahtwerk Erlau Ag, 7080 Aalen | Gleitschutz- bzw. reifenschutzkette fuer hintereinander angeordnete raeder eines kraftfahrzeuges |
| US3284964A (en) | 1964-03-26 | 1966-11-15 | Saito Norio | Flexible beam structures |
| US3311424A (en) | 1965-06-03 | 1967-03-28 | Marval & O Farrell | Tractive device comprising a belt driven soft roller |
| US3362492A (en) | 1966-02-14 | 1968-01-09 | Darrell L. Hansen | Snowbike attachment |
| GB1199729A (en) | 1966-10-24 | 1970-07-22 | Rowland Lewis Robert Morgan | Tractor Vehicle for Underwater Use |
| US3565198A (en) | 1967-06-26 | 1971-02-23 | Whiting Corp | Steering, driving and single track support systems for vehicles |
| US3497083A (en) | 1968-05-10 | 1970-02-24 | Us Navy | Tensor arm manipulator |
| US3489236A (en) | 1968-08-01 | 1970-01-13 | Us Army | Egressing device for military vehicles |
| US3572325A (en) | 1968-10-25 | 1971-03-23 | Us Health Education & Welfare | Flexible endoscope having fluid conduits and control |
| US3609804A (en) | 1969-08-27 | 1971-10-05 | Marvin Glass & Associates | Vehicle |
| US3808078A (en) | 1970-01-05 | 1974-04-30 | Norfin | Glass fiber cable, method of making, and its use in the manufacture of track vehicles |
| US3715146A (en) | 1970-01-19 | 1973-02-06 | W Robertson | Snow cleat and track for tracked vehicle |
| US3650343A (en) | 1970-03-12 | 1972-03-21 | John B Helsell | Ski slope traversing and conditioning vehicle |
| US3700115A (en) | 1970-09-17 | 1972-10-24 | Koehring Co | Vehicle with variable width ground supports |
| US3707218A (en) | 1970-10-26 | 1972-12-26 | Mackey M Payne | Conveyor apparatus |
| US3757635A (en) | 1971-03-23 | 1973-09-11 | F Hickerson | Multi-purpose munitions carrier |
| US3974907A (en) | 1971-10-29 | 1976-08-17 | Gordon A. Brewer | Flexible mobile conveyor |
| US3712481A (en) | 1971-12-23 | 1973-01-23 | Mc Donnell Douglas Corp | Actuator |
| US3841424A (en) | 1971-12-27 | 1974-10-15 | Caterpillar Tractor Co | Triangular track resilient bogie suspension |
| US3820616A (en) | 1972-02-03 | 1974-06-28 | American Hoist & Derrick Co | Crawler vehicle with dual extensible side frames |
| US3933214A (en) | 1972-07-12 | 1976-01-20 | Guibord Georges E | All terrain pleasure vehicle |
| US3864983A (en) | 1972-09-15 | 1975-02-11 | Stephen C Jacobsen | Rotary-to-linear and linear-to-rotary motion converters |
| US3934664A (en) | 1973-02-01 | 1976-01-27 | Pohjola Jorma | Steering mechanism for track vehicles |
| US5672044A (en) | 1974-01-24 | 1997-09-30 | Lemelson; Jerome H. | Free-traveling manipulator with powered tools |
| FI51306C (fi) | 1975-01-30 | 1976-12-10 | Pohjola Jorma | Menetelmä ja laite kääntyvätelaisessa ajoneuvossa. |
| US4068905A (en) | 1975-09-10 | 1978-01-17 | Black Chester A | Detachable road protecting device for tracked vehicles |
| US4059315A (en) | 1976-01-02 | 1977-11-22 | Jolliffe James D | Cleat anchor for flexible vehicle track |
| NO137351C (no) | 1976-01-30 | 1978-02-22 | Trallfa Nils Underhaug As | B¦yelig robotarm. |
| BE845263A (nl) | 1976-08-18 | 1976-12-16 | Zelfbewegende trekkereenheind | |
| US4109971A (en) | 1976-10-12 | 1978-08-29 | Black Chester A | Detachable road protecting devices for tracked vehicles |
| US4589460A (en) | 1978-01-03 | 1986-05-20 | Albee William H | Off road vehicles |
| US4218101A (en) | 1978-04-03 | 1980-08-19 | De Lorean Manufacturing Company | Low disturbance track cleat and ice calk structure for firm or icy snow |
| US4332424A (en) | 1978-04-03 | 1982-06-01 | De Lorean Manufacturing Company | Low disturbance track cleat and ice calk structure for firm or icy snow |
| SE419421B (sv) | 1979-03-16 | 1981-08-03 | Ove Larson | Bojlig arm i synnerhet robotarm |
| US4494417A (en) | 1979-03-16 | 1985-01-22 | Robotgruppen Hb | Flexible arm, particularly a robot arm |
| DE2926798C2 (de) | 1979-07-03 | 1986-05-28 | Klöckner-Werke AG, 4100 Duisburg | Kettenkratzerförderer |
| US4339031A (en) | 1979-10-01 | 1982-07-13 | Joy Manufacturing Company | Monorail suspended conveyor system |
| US4260053A (en) | 1979-10-09 | 1981-04-07 | Hirosuke Onodera | Flexible conveyor belt |
| CA1118021A (en) | 1980-01-29 | 1982-02-09 | Her Majesty The Queen In Right Of Canada As Represented By The Minister Of National Defence Of Her Majesty's Canadian Government | Track for rope vehicle |
| DE3025840C2 (de) | 1980-07-08 | 1983-08-04 | Mowag Motorwagenfabrik Ag, Kreuzlingen | Kettenglied für eine Gleiskette |
| US4453611A (en) | 1980-10-10 | 1984-06-12 | Stacy Jr Jack C | Terrain vehicle having a single, latterally bendable track |
| US4636137A (en) | 1980-10-24 | 1987-01-13 | Lemelson Jerome H | Tool and material manipulation apparatus and method |
| US4713896A (en) | 1981-04-10 | 1987-12-22 | Jennens Eric G | Inshore submersible amphibious machines |
| JPS5880387U (ja) * | 1981-11-27 | 1983-05-31 | 株式会社明電舎 | マニプレ−タを具えた走行台車 |
| US4489826A (en) | 1982-02-05 | 1984-12-25 | Philip Dubson | Adjustable apparatus |
| US4483407A (en) * | 1982-03-26 | 1984-11-20 | Hitachi, Ltd. | Variable configuration track laying vehicle |
| SE436175B (sv) | 1982-07-05 | 1984-11-19 | Robotgruppen Hb | Anordning for vridstyv forbindelse av i en robotarm eller liknande ingaende element |
| DE3236947A1 (de) | 1982-10-06 | 1984-04-12 | Rainer 6074 Rödermark Hitzel | Rohrmanipulator fuer das durchfahren von rohrleitungen |
| US4806066A (en) | 1982-11-01 | 1989-02-21 | Microbot, Inc. | Robotic arm |
| US4671774A (en) | 1983-01-28 | 1987-06-09 | Owsen Paul J | All terrain vehicle |
| GB8303694D0 (en) | 1983-02-10 | 1983-03-16 | Atomic Energy Authority Uk | Manipulators |
| US4900218A (en) | 1983-04-07 | 1990-02-13 | Sutherland Ivan E | Robot arm structure |
| US4551061A (en) | 1983-04-18 | 1985-11-05 | Olenick Ralph W | Flexible, extensible robot arm |
| GB2145691B (en) | 1983-08-29 | 1987-06-03 | Toshiba Kk | Extendible and contractable arms |
| US4661039A (en) | 1983-10-20 | 1987-04-28 | Donaldson Company | Flexible-frame robot |
| CA1245510A (en) | 1984-03-05 | 1988-11-29 | Arktos Developments Ltd. | All terrain vehicle and method of operating same |
| JPS6120484U (ja) * | 1984-07-12 | 1986-02-06 | カシオ計算機株式会社 | 走行車 |
| JPS6154378A (ja) * | 1984-08-24 | 1986-03-18 | Chubu Electric Power Co Inc | ロボツトの階段自動昇降装置 |
| US4646906A (en) | 1984-09-06 | 1987-03-03 | Fairchild Incorporated | Apparatus for continuously conveying coal from a continuous miner to a remote floor conveyor |
| JPS6175069A (ja) * | 1984-09-10 | 1986-04-17 | Mitsubishi Electric Corp | 移動装置 |
| US4736826A (en) | 1985-04-22 | 1988-04-12 | Remote Technology Corporation | Remotely controlled and/or powered mobile robot with cable management arrangement |
| JPH0228152Y2 (zh) * | 1985-05-01 | 1990-07-27 | ||
| FI852478L (fi) | 1985-06-20 | 1986-12-21 | Reta-Myynti Ky | Foerfarande i fordon med svaengbar larvmatta foer att aostadkomma baettre koerstabiliteter. |
| JPH0228153Y2 (zh) * | 1985-08-20 | 1990-07-27 | ||
| US4752105A (en) | 1985-10-24 | 1988-06-21 | Barnard Jan H | Vehicle traction |
| FR2589238B1 (fr) | 1985-10-25 | 1987-11-20 | Commissariat Energie Atomique | Capteur de mesure d'efforts et de couples et applications d'un tel capteur a un palpeur et a un dispositif de prehension |
| GB8526602D0 (en) | 1985-10-29 | 1986-11-05 | Secr Defence | Unmanned vehicle |
| US4700693A (en) | 1985-12-09 | 1987-10-20 | Welch Allyn, Inc. | Endoscope steering section |
| US4784042A (en) | 1986-02-12 | 1988-11-15 | Nathaniel A. Hardin | Method and system employing strings of opposed gaseous-fluid inflatable tension actuators in jointed arms, legs, beams and columns for controlling their movements |
| US4756662A (en) | 1986-03-31 | 1988-07-12 | Agency Of Industrial Science & Technology | Varible compliance manipulator |
| US4714125A (en) | 1986-05-05 | 1987-12-22 | Stacy Jr Jack C | Single laterally bendable track snowmobile |
| US4862047A (en) | 1986-05-21 | 1989-08-29 | Kabushiki Kaisha Komatsu Seisakusho | Apparatus for guiding movement of an unmanned moving body |
| US4765795A (en) | 1986-06-10 | 1988-08-23 | Lord Corporation | Object manipulator |
| DE3626238A1 (de) | 1986-08-02 | 1988-02-18 | Kloeckner Becorit Gmbh | Lenkbares raupenfahrwerk |
| JPS6332084U (zh) * | 1986-08-19 | 1988-03-01 | ||
| US5219264A (en) | 1986-09-19 | 1993-06-15 | Texas Instruments Incorporated | Mobile robot on-board vision system |
| US4828339A (en) | 1986-09-30 | 1989-05-09 | Joy Technologies Inc. | Crawler chain |
| FR2609335B1 (fr) | 1987-01-05 | 1989-04-14 | Protee | Systeme de reperage du mouvement d'un vehicule a chenilles |
| JPS63237892A (ja) | 1987-03-23 | 1988-10-04 | 株式会社小松製作所 | 可撓腕 |
| GB8709125D0 (en) | 1987-04-15 | 1987-05-20 | Siren A O | All-terrain hydrofoil train |
| US4828453A (en) | 1987-04-21 | 1989-05-09 | The United States Of America As Represented By The United States Department Of Energy | Modular multimorphic kinematic arm structure and pitch and yaw joint for same |
| US4796607A (en) | 1987-07-28 | 1989-01-10 | Welch Allyn, Inc. | Endoscope steering section |
| JPS6471686A (en) | 1987-09-09 | 1989-03-16 | Komatsu Mfg Co Ltd | Flexible arm robot |
| US4848179A (en) | 1988-02-16 | 1989-07-18 | Trw Inc. | Flexidigit robotic manipulator |
| US5021798A (en) | 1988-02-16 | 1991-06-04 | Trw Inc. | Antenna with positionable reflector |
| US5046914A (en) | 1988-07-12 | 1991-09-10 | Cybermation, Inc. | Parallel lifting device |
| US4862808A (en) | 1988-08-29 | 1989-09-05 | Gas Research Institute | Robotic pipe crawling device |
| US4932831A (en) | 1988-09-26 | 1990-06-12 | Remotec, Inc. | All terrain mobile robot |
| FR2638813B1 (fr) | 1988-11-09 | 1991-02-01 | Nancy Ecole Sup Sciences Techn | Vehicule autopropulse pour meulage de tuyauterie |
| DE4000348A1 (de) | 1989-03-06 | 1990-09-13 | Hewlett Packard Co | Vorrichtung und verfahren zum ueberwachen der bewegungen eines vielgelenkigen roboters |
| US4932491A (en) | 1989-03-21 | 1990-06-12 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Body steered rover |
| FR2651201B1 (fr) | 1989-08-31 | 1991-10-25 | Framatome Sa | Vehicule a chenilles inclinables. |
| US5018591A (en) | 1990-04-24 | 1991-05-28 | Caterpillar Inc. | Track laying work vehicle |
| US5080000A (en) | 1990-05-11 | 1992-01-14 | Bubic Frank R | Flexible robotic links and manipulator trunks made thereform |
| US5205612A (en) | 1990-05-17 | 1993-04-27 | Z C Mines Pty. Ltd. | Transport apparatus and method of forming same |
| EP0465743A1 (en) | 1990-07-12 | 1992-01-15 | British Aerospace Public Limited Company | Teach and report probe for a robot arm |
| US5588688A (en) | 1990-08-06 | 1996-12-31 | Sarcos, Inc. | Robotic grasping apparatus |
| US4997790A (en) * | 1990-08-13 | 1991-03-05 | Motorola, Inc. | Process for forming a self-aligned contact structure |
| US5186526A (en) | 1990-08-31 | 1993-02-16 | General Chemical Corporation | One-piece crawler pad |
| US5252870A (en) | 1991-03-01 | 1993-10-12 | Jacobsen Stephen C | Magnetic eccentric motion motor |
| US5142932A (en) | 1991-09-04 | 1992-09-01 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Flexible robotic arm |
| DE4133605C2 (de) | 1991-10-10 | 1994-05-11 | Siemens Ag | Flexibler Roboterarm |
| US5317952A (en) | 1991-11-22 | 1994-06-07 | Kinetic Sciences Inc. | Tentacle-like manipulators with adjustable tension lines |
| US5428713A (en) | 1991-11-25 | 1995-06-27 | Kabushiki Kaisha Toshiba | Compound module type manipulator apparatus |
| US5562843A (en) | 1991-12-28 | 1996-10-08 | Joven Electric Co., Ltd. | Industrial robot with contact sensor |
| US5199771A (en) | 1992-03-02 | 1993-04-06 | Logan Manufacturing Company | Not retaining cleat for vehicle endless track |
| JPH05270454A (ja) * | 1992-03-23 | 1993-10-19 | Takaoka Electric Mfg Co Ltd | 移動車 |
| US5297443A (en) | 1992-07-07 | 1994-03-29 | Wentz John D | Flexible positioning appendage |
| US5388900A (en) | 1992-07-15 | 1995-02-14 | Kabushiki Kaisha Suzuki Shoji | Crawler pad |
| US5443354A (en) | 1992-07-20 | 1995-08-22 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Hazardous materials emergency response mobile robot |
| US5366038A (en) | 1992-08-25 | 1994-11-22 | Nishiguchi Hidetsugu | Robot traveling on wall face |
| US5337732A (en) | 1992-09-16 | 1994-08-16 | Cedars-Sinai Medical Center | Robotic endoscopy |
| US5451135A (en) | 1993-04-02 | 1995-09-19 | Carnegie Mellon University | Collapsible mobile vehicle |
| US5350033A (en) | 1993-04-26 | 1994-09-27 | Kraft Brett W | Robotic inspection vehicle |
| US5435405A (en) | 1993-05-14 | 1995-07-25 | Carnegie Mellon University | Reconfigurable mobile vehicle with magnetic tracks |
| US5386741A (en) | 1993-06-07 | 1995-02-07 | Rennex; Brian G. | Robotic snake |
| US5413454A (en) | 1993-07-09 | 1995-05-09 | Movsesian; Peter | Mobile robotic arm |
| US5466056A (en) | 1993-07-26 | 1995-11-14 | Lmc Operating Corp. | Cleat retaining assembly for vehicle endless track |
| US5556370A (en) | 1993-07-28 | 1996-09-17 | The Board Of Trustees Of The Leland Stanford Junior University | Electrically activated multi-jointed manipulator |
| US5354124A (en) | 1993-09-07 | 1994-10-11 | Lmc Operating Corp. | Water sealed, cable reinforced vehicle endless track and cleat assembly |
| US5440916A (en) | 1993-11-15 | 1995-08-15 | The United States Of America As Represented By The Administrator Of The National Aeronatics And Space Administration | Emergency response mobile robot for operations in combustible atmospheres |
| JP2594880B2 (ja) * | 1993-12-29 | 1997-03-26 | 西松建設株式会社 | 自律走行型知能作業ロボット |
| US5551545A (en) | 1994-03-18 | 1996-09-03 | Gelfman; Stanley | Automatic deployment and retrieval tethering system |
| US5516249A (en) | 1994-05-10 | 1996-05-14 | Technical Research Associates, Inc. | Exoskeleton with kinesthetic feedback and robotic control |
| DE4426811C1 (de) | 1994-07-28 | 1995-10-19 | Siemens Ag | Präzise steuerbarer flexibler Aktor |
| GB2301187B (en) | 1995-05-22 | 1999-04-21 | British Gas Plc | Method of and apparatus for locating an anomaly in a duct |
| US5573316A (en) | 1995-06-02 | 1996-11-12 | Wankowski; Russell A. | Lightweight snowmobile traction stud |
| JP3267116B2 (ja) | 1995-09-19 | 2002-03-18 | ミノルタ株式会社 | 接触式センサおよび移動体 |
| US5821666A (en) | 1995-09-22 | 1998-10-13 | Nippondenso Co., Ltd. | United control system comprising a plurality of control units independently controllable |
| US5770913A (en) | 1995-10-23 | 1998-06-23 | Omnific International, Ltd. | Actuators, motors and wheelless autonomous robots using vibratory transducer drivers |
| DE19541458C1 (de) | 1995-11-07 | 1997-03-06 | Siemens Ag | Flexibler Aktor |
| US5697285A (en) | 1995-12-21 | 1997-12-16 | Nappi; Bruce | Actuators for simulating muscle activity in robotics |
| US5749828A (en) | 1995-12-22 | 1998-05-12 | Hewlett-Packard Company | Bending neck for use with invasive medical devices |
| CH690595A5 (de) | 1996-04-12 | 2000-10-31 | Ka Te System Ag | Steuereinrichtung für ein Fluidaggregate aufweisendes Gerät und Vorrichtung zum Sanieren von Rohren. |
| DE19617852A1 (de) | 1996-04-23 | 1997-10-30 | Karlsruhe Forschzent | Verfahren zur planaren Herstellung von pneumatischen und fluidischen Miniaturmanipulatoren |
| JP3126986B2 (ja) | 1996-06-12 | 2001-01-22 | 株式会社小松製作所 | クローラ式振動締固機械 |
| US6186604B1 (en) | 1996-06-19 | 2001-02-13 | Tyman H. Fikse | Tractor endless tread |
| US6030057A (en) | 1996-06-19 | 2000-02-29 | Fikse; Tyman H. | Tractor endless tread |
| US5963712A (en) | 1996-07-08 | 1999-10-05 | Sony Corporation | Selectively configurable robot apparatus |
| GB9614761D0 (en) | 1996-07-13 | 1996-09-04 | Schlumberger Ltd | Downhole tool and method |
| US5902254A (en) | 1996-07-29 | 1999-05-11 | The Nemours Foundation | Cathether guidewire |
| WO1998017577A1 (fr) | 1996-10-18 | 1998-04-30 | Kabushiki Kaisha Yaskawa Denki | Vehicule robotise pour tache sur ligne sous tension |
| IT1285533B1 (it) | 1996-10-22 | 1998-06-08 | Scuola Superiore Di Studi Universitari E Di Perfezionamento Sant Anna | Robot endoscopico |
| US6331181B1 (en) | 1998-12-08 | 2001-12-18 | Intuitive Surgical, Inc. | Surgical robotic tools, data architecture, and use |
| US6113343A (en) * | 1996-12-16 | 2000-09-05 | Goldenberg; Andrew | Explosives disposal robot |
| US5888235A (en) | 1997-01-07 | 1999-03-30 | Sarcos, Inc. | Body-powered prosthetic arm |
| DE19704080C2 (de) | 1997-02-04 | 1998-11-05 | Diehl Stiftung & Co | Minensuchgerät |
| GB9706625D0 (en) | 1997-04-01 | 1997-05-21 | Khairallah Charles | Hyper-redundant robot |
| US6281489B1 (en) | 1997-05-02 | 2001-08-28 | Baker Hughes Incorporated | Monitoring of downhole parameters and tools utilizing fiber optics |
| US6056237A (en) | 1997-06-25 | 2000-05-02 | Woodland; Richard L. K. | Sonotube compatible unmanned aerial vehicle and system |
| US6016385A (en) | 1997-08-11 | 2000-01-18 | Fanu America Corp | Real time remotely controlled robot |
| DE19746510C2 (de) | 1997-10-22 | 2003-03-06 | Pii Pipetronix Gmbh | Vorrichtung zum Durchfahren von Rohrleitungen |
| JP3919040B2 (ja) | 1997-11-30 | 2007-05-23 | ソニー株式会社 | ロボツト装置 |
| JP3765356B2 (ja) | 1997-12-22 | 2006-04-12 | ソニー株式会社 | ロボツト装置 |
| US6263989B1 (en) | 1998-03-27 | 2001-07-24 | Irobot Corporation | Robotic platform |
| DE19821306C2 (de) | 1998-05-13 | 2000-12-14 | Gmd Gmbh | Autonom navigierendes System mit Hinderniserkennung |
| US6138604A (en) | 1998-05-26 | 2000-10-31 | The Charles Stark Draper Laboratories, Inc. | Pelagic free swinging aquatic vehicle |
| US6203126B1 (en) | 1998-06-05 | 2001-03-20 | Northern Freight Brokers, Inc. | Traction stud for a snowmobile belt made of a non-metal material |
| US5984032A (en) | 1998-06-10 | 1999-11-16 | Gremillion; Ernest J. | Articulating marsh buggy |
| US6109705A (en) | 1998-08-07 | 2000-08-29 | Camoplast, Inc. | Snowmobile drive track for traveling on icy and hardened snow surface |
| JP3017182B1 (ja) | 1998-09-29 | 2000-03-06 | 富太郎 服部 | 履帯用パッド |
| US6162171A (en) | 1998-12-07 | 2000-12-19 | Wan Sing Ng | Robotic endoscope and an autonomous pipe robot for performing endoscopic procedures |
| DE19857891A1 (de) | 1998-12-15 | 2000-06-21 | Macmoter Spa | Raupenfahrzeug |
| DE19906970C2 (de) | 1999-02-19 | 2003-03-27 | Rheinmetall W & M Gmbh | Aufklärungssonde |
| US6333631B1 (en) | 1999-03-08 | 2001-12-25 | Minister Of National Defence Of Her Majesty's Canadian Government | Cantilevered manipulator for autonomous non-contact scanning of natural surfaces for the deployment of landmine detectors |
| US6820653B1 (en) | 1999-04-12 | 2004-11-23 | Carnegie Mellon University | Pipe inspection and repair system |
| US20020128714A1 (en) | 1999-06-04 | 2002-09-12 | Mark Manasas | Orthopedic implant and method of making metal articles |
| US6264294B1 (en) | 1999-06-04 | 2001-07-24 | International Engineering And Manufacturing, Inc. | Tapered traction stud, stud mount and method of making and mounting |
| US6264293B1 (en) | 1999-06-04 | 2001-07-24 | International Engineering & Manufacturing Inc | Traction stud mount and method of manufacturing and mounting |
| US6484083B1 (en) * | 1999-06-07 | 2002-11-19 | Sandia Corporation | Tandem robot control system and method for controlling mobile robots in tandem |
| US6523629B1 (en) | 1999-06-07 | 2003-02-25 | Sandia Corporation | Tandem mobile robot system |
| DE10018075A1 (de) | 1999-06-29 | 2001-01-18 | Daimler Chrysler Ag | Verfahren und Einrichtung zur Bekämpfung von Sprengkörpern,insbesondere Minen |
| JP2001038663A (ja) | 1999-07-28 | 2001-02-13 | Yamaha Motor Co Ltd | マシンの制御システム |
| AU772107B2 (en) | 1999-08-12 | 2004-04-08 | Perihelian, Llc | Shape-memory alloy actuators and control methods |
| US6505896B1 (en) | 2000-09-01 | 2003-01-14 | Alain Boivin | Track for snow vehicles |
| US7020701B1 (en) | 1999-10-06 | 2006-03-28 | Sensoria Corporation | Method for collecting and processing data using internetworked wireless integrated network sensors (WINS) |
| JP3326472B2 (ja) | 1999-11-10 | 2002-09-24 | 独立行政法人 航空宇宙技術研究所 | 多関節ロボット |
| US6260501B1 (en) | 2000-03-17 | 2001-07-17 | Arthur Patrick Agnew | Submersible apparatus for transporting compressed gas |
| US20050085693A1 (en) | 2000-04-03 | 2005-04-21 | Amir Belson | Activated polymer articulated instruments and methods of insertion |
| US6610007B2 (en) | 2000-04-03 | 2003-08-26 | Neoguide Systems, Inc. | Steerable segmented endoscope and method of insertion |
| US6550104B2 (en) * | 2000-04-06 | 2003-04-22 | Ernest D. Cacciacarne | Wheelbarrow handle adapter |
| JP3511088B2 (ja) | 2000-04-10 | 2004-03-29 | 独立行政法人航空宇宙技術研究所 | 多関節介護ロボット制御用の圧力分布センサ |
| US6450104B1 (en) | 2000-04-28 | 2002-09-17 | North Carolina State University | Modular observation crawler and sensing instrument and method for operating same |
| CA2407992C (en) | 2000-05-01 | 2010-07-20 | Irobot Corporation | Method and system for remote control of mobile robot |
| US6576406B1 (en) | 2000-06-29 | 2003-06-10 | Sarcos Investments Lc | Micro-lithographic method and apparatus using three-dimensional mask |
| US6477444B1 (en) | 2000-07-07 | 2002-11-05 | Fuji Xerox Co., Ltd. | Method for the automated design of decentralized controllers for modular self-reconfigurable robots |
| FR2812067B1 (fr) | 2000-07-18 | 2003-05-16 | Commissariat Energie Atomique | Robot mobile apte a travailler dans des tuyaux ou d'autres passages etroits |
| GB0020461D0 (en) | 2000-08-18 | 2000-10-11 | Oliver Crispin Consulting Ltd | Improvements in and relating to the robotic positioning of a work tool to a sensor |
| US6422509B1 (en) | 2000-11-28 | 2002-07-23 | Xerox Corporation | Tracking device |
| US6488306B1 (en) * | 2000-12-21 | 2002-12-03 | Sandia Corporation | Mobility platform coupling device and method for coupling mobility platforms |
| EP1258419B1 (en) | 2000-12-22 | 2008-01-23 | Hitachi Construction Machinery Co., Ltd. | Crawler belt |
| DE60205353T2 (de) | 2001-03-07 | 2006-04-20 | Carnegie Mellon University | Robotersystem zur inspektion von gasleitungen |
| US6870343B2 (en) * | 2001-03-30 | 2005-03-22 | The University Of Michigan | Integrated, proportionally controlled, and naturally compliant universal joint actuator with controllable stiffness |
| US6774597B1 (en) | 2001-03-30 | 2004-08-10 | The Regents Of The University Of Michigan | Apparatus for obstacle traversion |
| US6512345B2 (en) | 2001-03-30 | 2003-01-28 | The Regents Of The University Of Michigan | Apparatus for obstacle traversion |
| US6636781B1 (en) | 2001-05-22 | 2003-10-21 | University Of Southern California | Distributed control and coordination of autonomous agents in a dynamic, reconfigurable system |
| US6725128B2 (en) | 2001-07-02 | 2004-04-20 | Xerox Corporation | Self-reconfigurable robot |
| JP3557460B2 (ja) * | 2001-07-09 | 2004-08-25 | 東京工業大学長 | 走行装置 |
| US20040216932A1 (en) | 2001-07-09 | 2004-11-04 | United Defense, Lp | Hybrid wheel and track vehicle drive system |
| US6619146B2 (en) | 2001-08-07 | 2003-09-16 | The Charles Stark Draper Laboratory, Inc. | Traveling wave generator |
| US6563084B1 (en) | 2001-08-10 | 2003-05-13 | Lincoln Global, Inc. | Probe for touch sensing |
| US6715575B2 (en) | 2001-08-16 | 2004-04-06 | Formula Fast Racing | Track tensioning system for a tracked vehicle |
| US6799815B2 (en) | 2001-09-12 | 2004-10-05 | The Goodyear Tire & Rubber Company | Cold environment endless rubber track and vehicle containing such track |
| US6835173B2 (en) | 2001-10-05 | 2004-12-28 | Scimed Life Systems, Inc. | Robotic endoscope |
| US6672344B1 (en) | 2001-10-26 | 2004-01-06 | Perseptive Biosystems, Inc. | Robotic system having positionally adjustable multiple probes |
| JP4403571B2 (ja) | 2001-11-22 | 2010-01-27 | 正喜 江刺 | 能動ガイドワイヤ及びその製造方法 |
| US6772673B2 (en) | 2001-12-13 | 2004-08-10 | Seiko Epson Corporation | Flexible actuator |
| US6859359B2 (en) | 2002-01-30 | 2005-02-22 | The United States Of America As Represented By The Secretary Of The Army | Modular sensor platform |
| US6540310B1 (en) | 2002-02-01 | 2003-04-01 | Ironwood Designs Llc | Grouser |
| US6773327B1 (en) | 2002-02-12 | 2004-08-10 | Hasbro, Inc. | Apparatus for actuating a toy |
| US6595812B1 (en) | 2002-02-15 | 2003-07-22 | Harry Haney | Amphibious vehicle |
| US6732015B2 (en) | 2002-03-14 | 2004-05-04 | Kabushiki Kaisha Toshiba | Robot system |
| AUPS124302A0 (en) | 2002-03-20 | 2002-04-18 | Gibbins, John | A compaction wheel |
| US6652164B2 (en) | 2002-03-28 | 2003-11-25 | Pelco | Retractable camera mounting mechanism |
| US6831436B2 (en) | 2002-04-22 | 2004-12-14 | Jose Raul Gonzalez | Modular hybrid multi-axis robot |
| JP4112891B2 (ja) * | 2002-04-22 | 2008-07-02 | 株式会社東芝 | 原子炉内移動装置 |
| US20040030571A1 (en) | 2002-04-22 | 2004-02-12 | Neal Solomon | System, method and apparatus for automated collective mobile robotic vehicles used in remote sensing surveillance |
| US20050235899A1 (en) | 2002-04-30 | 2005-10-27 | Ikuo Yamamoto | Fish-shaped underwater navigating body, control system thereof, and aquarium |
| US6651804B2 (en) | 2002-04-30 | 2003-11-25 | Joy Mm Delaware, Inc. | Self-propelled articulated conveyor system |
| FR2839916B1 (fr) | 2002-05-22 | 2004-10-15 | Agence Spatiale Europeenne | Exosquelette pour bras humain, notamment pour des applications spatiales |
| KR100812506B1 (ko) | 2002-05-31 | 2008-03-11 | 후지쯔 가부시끼가이샤 | 원격 조작 로봇 및 로봇 자기 위치 추정 방법 |
| US7040426B1 (en) | 2002-06-04 | 2006-05-09 | Polaris Industries, Inc. | Suspension for a tracked vehicle |
| WO2004028753A2 (en) | 2002-09-26 | 2004-04-08 | Barrett Technology, Inc. | Intelligent, self-contained robotic hand |
| US7137465B1 (en) | 2002-10-02 | 2006-11-21 | The Charles Stark Draper Laboratory, Inc. | Crawler device |
| US7303010B2 (en) | 2002-10-11 | 2007-12-04 | Intelligent Robotic Corporation | Apparatus and method for an autonomous robotic system for performing activities in a well |
| CA2409792C (en) | 2002-10-25 | 2004-01-27 | Soucy International Inc. | Non-repeating sequence of profiles |
| US7069124B1 (en) | 2002-10-28 | 2006-06-27 | Workhorse Technologies, Llc | Robotic modeling of voids |
| US6936003B2 (en) | 2002-10-29 | 2005-08-30 | Given Imaging Ltd | In-vivo extendable element device and system, and method of use |
| CA2412815A1 (fr) | 2002-11-27 | 2004-05-27 | Martin Deschambault | Plate-forme robotique mobile et modulaire offrant plusieurs modes de locomotion pour effectuer des mouvements evolues en trois dimensions |
| US7415321B2 (en) | 2002-12-12 | 2008-08-19 | Matsushita Electric Industrial Co., Ltd. | Robot controller |
| IL153758A (en) | 2002-12-31 | 2007-09-20 | Israel Aerospace Ind Ltd | Unmanned tactical platform |
| FR2850350B1 (fr) | 2003-01-29 | 2006-03-10 | Bernard Coeuret | Vehicule a chenilles a chassis muni d'un moyen de pivotement |
| AU2003300218A1 (en) | 2003-01-31 | 2004-08-23 | Carl Zeiss Industrielle Messtechnik Gmbh | Probe for a coordinate measuring device |
| US7331436B1 (en) | 2003-03-26 | 2008-02-19 | Irobot Corporation | Communications spooler for a mobile robot |
| US6837318B1 (en) | 2003-03-28 | 2005-01-04 | Hanna Craig | Rescue and exploration apparatus |
| WO2004096502A1 (en) | 2003-04-28 | 2004-11-11 | Stephen James Crampton | Cmm arm with exoskeleton |
| US6974356B2 (en) | 2003-05-19 | 2005-12-13 | Nekton Research Llc | Amphibious robot devices and related methods |
| US7090637B2 (en) | 2003-05-23 | 2006-08-15 | Novare Surgical Systems, Inc. | Articulating mechanism for remote manipulation of a surgical or diagnostic tool |
| US7044245B2 (en) | 2003-06-17 | 2006-05-16 | Science Applications International Corporation | Toroidal propulsion and steering system |
| JP3834651B2 (ja) * | 2003-09-04 | 2006-10-18 | 防衛庁技術研究本部長 | 走行型ロボット |
| US7543664B2 (en) * | 2003-09-18 | 2009-06-09 | The Johns Hopkins University | Mono-track vehicle |
| CN1603068A (zh) | 2003-09-29 | 2005-04-06 | 中国科学院自动化研究所 | 基于无线网络的多机器人搬运控制系统 |
| JP4607442B2 (ja) | 2003-10-07 | 2011-01-05 | 国立大学法人東京工業大学 | クローラ型走行ロボット |
| US6964312B2 (en) * | 2003-10-07 | 2005-11-15 | International Climbing Machines, Inc. | Surface traversing apparatus and method |
| US7578565B2 (en) * | 2003-11-20 | 2009-08-25 | Tokyo Institute Of Technology | Crawler belt, crawler unit and method for manufacturing crawler belt |
| CA2456455C (en) | 2004-01-28 | 2007-05-01 | Camoplast Inc Power Sports | REINFORCED AMOUNT BUILDING |
| CA2456622A1 (en) | 2004-02-02 | 2005-08-02 | Camoplast Inc. | Track with various hardnesses |
| EP1741044B1 (en) | 2004-03-27 | 2011-09-14 | Harvey Koselka | Autonomous personal service robot |
| US7188473B1 (en) | 2004-04-26 | 2007-03-13 | Harry HaruRiko Asada | Shape memory alloy actuator system using segmented binary control |
| US7865268B2 (en) | 2004-06-24 | 2011-01-04 | Massachusetts Institute Of Technology | Mechanical fish robot exploiting vibration modes for locomotion |
| US9011318B2 (en) | 2004-06-25 | 2015-04-21 | Carnegie Mellon University and University of Pittsburg—Of the Commonwealth System of Higher Education | Steerable, follow the leader device |
| US7475637B2 (en) | 2004-07-09 | 2009-01-13 | Jahangir S. Rastegar | Gun fired sensor platforms |
| CA2512299C (en) | 2004-09-07 | 2017-11-07 | Camoplast Inc. | Powder snow track for snowmobile |
| IL165489A0 (en) | 2004-12-01 | 2006-01-15 | Odf Optronics Ltd | Smart arrow |
| US20060156851A1 (en) | 2004-12-02 | 2006-07-20 | Jacobsen Stephen C | Mechanical serpentine device |
| DE602005021918D1 (de) | 2004-12-20 | 2010-07-29 | Tokyo Inst Tech | Endloskörper und raupenvorrichtung |
| CN2774717Y (zh) | 2005-01-17 | 2006-04-26 | 江南大学 | 多自由度柔性关节的蛇形机器人 |
| US7188568B2 (en) | 2005-06-29 | 2007-03-13 | Arizona Public Service Company | Self-propelled vehicle for movement within a tubular member |
| US7493976B2 (en) * | 2005-08-04 | 2009-02-24 | Engineering Services, Inc. | Variable configuration articulated tracked vehicle |
| JP4565107B2 (ja) | 2005-08-31 | 2010-10-20 | 株式会社東芝 | アーム機構を備えた移動ロボット |
| US7860614B1 (en) | 2005-09-13 | 2010-12-28 | The United States Of America As Represented By The Secretary Of The Army | Trainer for robotic vehicle |
| GB0522924D0 (en) | 2005-11-10 | 2005-12-21 | Allen Vanguard Ltd | Remotely operated machine with manipulator arm |
| CN100509524C (zh) | 2005-11-25 | 2009-07-08 | 杨宁 | 约束履带式柔性越障车 |
| US8374754B2 (en) | 2005-12-05 | 2013-02-12 | Niitek, Inc. | Apparatus for detecting subsurface objects with a reach-in arm |
| WO2008013568A2 (en) | 2005-12-30 | 2008-01-31 | Irobot Corporation | Autonomous mobile robot |
| JP2007216936A (ja) * | 2006-02-15 | 2007-08-30 | Kenjiro Tadakuma | 推進力発生装置連結機構 |
| US7475745B1 (en) | 2006-05-11 | 2009-01-13 | Deroos Bradley G | High mobility vehicle |
| US8224485B2 (en) | 2006-05-24 | 2012-07-17 | Titan Medical Inc. | Snaking robotic arm with movable shapers |
| US7843431B2 (en) * | 2007-04-24 | 2010-11-30 | Irobot Corporation | Control system for a remote vehicle |
| US7654348B2 (en) | 2006-10-06 | 2010-02-02 | Irobot Corporation | Maneuvering robotic vehicles having a positionable sensor head |
| US7798264B2 (en) | 2006-11-02 | 2010-09-21 | Hutcheson Timothy L | Reconfigurable balancing robot and method for dynamically transitioning between statically stable mode and dynamically balanced mode |
| EP2092265B1 (en) | 2006-11-13 | 2013-04-10 | Raytheon Company | Unmanned ground robotic vehicle having an alternatively extendible and retractable sensing appendage |
| EP2082159B1 (en) * | 2006-11-13 | 2013-04-10 | Raytheon Company | Serpentine robotic crawler |
| DE602007013793D1 (de) | 2006-11-13 | 2011-05-19 | Raytheon Co | Anpassbare spuranordnung für einen raupenroboter |
| US7707162B2 (en) | 2007-01-08 | 2010-04-27 | International Business Machines Corporation | Method and apparatus for classifying multimedia artifacts using ontology selection and semantic classification |
| US7974736B2 (en) | 2007-04-05 | 2011-07-05 | Foster-Miller, Inc. | Robot deployed weapon system and safing method |
| WO2010144820A2 (en) | 2009-06-11 | 2010-12-16 | Raytheon Sarcos, Llc | Amphibious robotic crawler |
| WO2010144813A1 (en) | 2009-06-11 | 2010-12-16 | Raytheon Sarcos, Llc | Method and system for deploying a surveillance network |
-
2007
- 2007-11-13 CN CN2007800497385A patent/CN101583530B/zh not_active Expired - Fee Related
- 2007-11-13 JP JP2009536343A patent/JP5411702B2/ja active Active
- 2007-11-13 EP EP07870880A patent/EP2099672B1/en active Active
- 2007-11-13 EP EP11176735.6A patent/EP2476604B1/en not_active Not-in-force
- 2007-11-13 US US11/985,336 patent/US8185241B2/en active Active
- 2007-11-13 WO PCT/US2007/023870 patent/WO2008076193A2/en active Application Filing
- 2007-11-13 AT AT07870880T patent/ATE522431T1/de not_active IP Right Cessation
-
2009
- 2009-05-12 IL IL198711A patent/IL198711A/en not_active IP Right Cessation
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5363935A (en) * | 1993-05-14 | 1994-11-15 | Carnegie Mellon University | Reconfigurable mobile vehicle with magnetic tracks |
| US5650579A (en) * | 1995-12-05 | 1997-07-22 | General Electric Company | Miniature air gap inspection crawler |
| DE20314213U1 (de) * | 2003-09-12 | 2003-11-20 | Ebisch Siegfried | Schreitender Roboter |
| WO2005082306A1 (de) * | 2004-02-27 | 2005-09-09 | Losch Airport Equipment Gmbh | Treppengängiges transportfahrzeug für rollstühle |
| EP1832501A2 (en) * | 2006-03-10 | 2007-09-12 | National Institute of Advanced Industrial Science and Technology | Crawler robot |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107932473A (zh) * | 2012-07-27 | 2018-04-20 | 工程服务公司 | 具有柔性可展开尾部的移动机器人 |
Also Published As
| Publication number | Publication date |
|---|---|
| IL198711A0 (en) | 2010-02-17 |
| US8185241B2 (en) | 2012-05-22 |
| EP2099672B1 (en) | 2011-08-31 |
| ATE522431T1 (de) | 2011-09-15 |
| EP2476604B1 (en) | 2013-08-21 |
| CN101583530A (zh) | 2009-11-18 |
| US20080167752A1 (en) | 2008-07-10 |
| JP5411702B2 (ja) | 2014-02-12 |
| WO2008076193A2 (en) | 2008-06-26 |
| WO2008076193A3 (en) | 2008-09-25 |
| EP2099672A2 (en) | 2009-09-16 |
| JP2010509128A (ja) | 2010-03-25 |
| IL198711A (en) | 2013-08-29 |
| EP2476604A1 (en) | 2012-07-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101583530B (zh) | 具有可动臂件的机器人履带车 | |
| CN101583820B (zh) | 蛇形机器人履带车 | |
| CN101778756B (zh) | 具有连续履带的蛇形机器人履带车 | |
| US9216781B2 (en) | Maneuvering robotic vehicles | |
| US8292007B2 (en) | Wheeled platforms | |
| EP3345811B1 (en) | Walking mechanism and electric power-assisted vehicle and toy equipped with same | |
| US7493976B2 (en) | Variable configuration articulated tracked vehicle | |
| JP2005111595A (ja) | クローラ型走行ロボット | |
| JPH023754B2 (zh) | ||
| Granosik | Hypermobile robots–the survey | |
| KR101094740B1 (ko) | 이동로봇 | |
| KR20210152271A (ko) | 이동체 | |
| KR102468550B1 (ko) | 험지주행이 가능한 주행로봇 | |
| KR20160059238A (ko) | 주행 장치 | |
| CN113276983A (zh) | 轮式底盘以及行走设备 | |
| JP2604112B2 (ja) | 全方向移動用車両 | |
| KR20170091942A (ko) | 가변형 다자유도 바퀴 모듈 | |
| CN113478464B (zh) | 一种重心可调的并联仿生移动平台 | |
| CN113467467B (zh) | 一种重心可调并联仿生移动机器人的控制方法 | |
| CN110304161B (zh) | 一种可变形的履带式行走装置 | |
| JP2023044065A (ja) | 移動体 | |
| Coronel et al. | Overcoming Obstacles Using Tail STAR: A Novel Sprawling Robot With a Two-Joint Tail | |
| WO2023107081A1 (en) | Cave and urban area unmanned ground vehicle | |
| Kinugasa et al. | Development of Flexible Tracked Vehicle d-FlexCraw: Evaluation for Mobility against Rough Terrain | |
| CN111232091A (zh) | 一种高机动性高越障能力的小型无人车 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20120704 Termination date: 20151113 |
|
| EXPY | Termination of patent right or utility model |