CN1168965A - 线性压缩机的驱动设备 - Google Patents
线性压缩机的驱动设备 Download PDFInfo
- Publication number
- CN1168965A CN1168965A CN97109762A CN97109762A CN1168965A CN 1168965 A CN1168965 A CN 1168965A CN 97109762 A CN97109762 A CN 97109762A CN 97109762 A CN97109762 A CN 97109762A CN 1168965 A CN1168965 A CN 1168965A
- Authority
- CN
- China
- Prior art keywords
- current
- amplitude
- piston
- speed
- linearkompressor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images















Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/06—Control using electricity
- F04B49/065—Control using electricity and making use of computers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B35/00—Piston pumps specially adapted for elastic fluids and characterised by the driving means to their working members, or by combination with, or adaptation to, specific driving engines or motors, not otherwise provided for
- F04B35/04—Piston pumps specially adapted for elastic fluids and characterised by the driving means to their working members, or by combination with, or adaptation to, specific driving engines or motors, not otherwise provided for the means being electric
- F04B35/045—Piston pumps specially adapted for elastic fluids and characterised by the driving means to their working members, or by combination with, or adaptation to, specific driving engines or motors, not otherwise provided for the means being electric using solenoids
Abstract
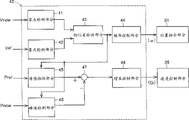
在线性压缩机驱动设备中,位置指令部分(31)按照方程式A*sinωt输出活塞的位置指令值Pref。位置控制部分(33)计算速度指令值Vref。速度控制部分(35)将速度指令值Vref与速度当前值Vnow之差乘以常数Gi计算电流指令值Iref。电流控制部分(37)控制电源(3),使电流当前值Inow等于电流指令值Iref。相位控制部分(38)调整ω和Gi,消除速度当前值Vnow与电流指令值Iref之间的相位差。由于能够按照负载的条件适当地直接控制线性发动机的推力,所以获得高效率。
Description
本发明涉及线性压缩机的驱动设备,更具体地说,涉及驱动线性压缩机的设备,其中活塞由线性发动机驱动在气缸内往复运动,以产生压缩气体。
近来,已经研制了一种线性压缩机作为诸如冷冻机等冷却设备中对已膨胀的冷却剂气体进行压缩用的机械。在线性压缩机中,活塞被线性发动机和谐振机械弹簧驱动,压缩气体。
在这样的线性压缩机中,非线性力(气体的弹力)是在与吸气、压缩和排气相联系的压缩阶段中产生的,而非线性力由于,例如,激活时负载的变化而变化。
但是,在传统的线性压缩机中,根本就没有控制线性发动机推力的装置,而不管负载的变化,一律向线性发动机提供恒定的电力。因此,输出能量与输入能量之比(下文中称为效率)一直是低的。尽管已有人研究按照负载的变化控制供给线性发动机线圈的电压的方法,但是不能令人满意。
因此,本发明的目的和是提供一种能使线性压缩机获得高效率的驱动设备。
在按照本发明一个方面的线性压缩机驱动设备中,采用一种多回路控制电路,它包括位置指令/检测部分、速度指令/检测部分、电流指令/检测部分和电流控制部分,并调整位置指令值的频率,以消除速度当前值和电流指令值之间的相位差。因此,可以按照负载条件适当地直接控制线性发动机的推力,使之能够获得较高的效率。
速度检测部分最好通过对位置检测部分的检测结果进行微分,检测活塞的速度。因此,不必单独设置速度检测用的传感器。
速度指令部分最好将位置指令值与位置当前值之差乘以第一增益常数,而算出速度指令值,电流指令部分将电流指令值与电流当前值之差乘以第二增益常数,而算出电流指令值,而增益调整部分则调整第一和第二增益常数之中的至少一个,以消除速度当前值与电流指令值之间的相位差。因此,可以按照负载的条件调整电流控制的响应,并且更适当地控制线性发动机的推力。
速度指令部分最好将位置指令值与位置当前值之差乘以第一增益常数,而算出速度指令值,电流指令装置将电流指令值与电流当前值之差乘以第二增益常数,而算出电流指令值,而增益调整部分则调整第一和第二增益常数之中的至少一个,以消除位置指令值峰值与位置检测值峰值之间的差。因此,可以按照负载的条件适当地直接控制线性发动机的推力,使之能够达到较高的效率。
相位差检测部分最好检测速度当前值的过零点和电流指令值的过零点,并根据检测结果检测相位差。因此,相位差检测部分可用简单的方法形成。
相位差检测部分最好检测速度当前值的峰点和电流指令值的峰点,并根据检测结果检测相位差。因此,相位差检测部分可用简单的方法形成。
振幅调整部分最好按照所需要的压缩气体量调整位置指令部分用的正弦函数的振幅。因而,可以按照所需要的压缩气体量适当地直接控制线性发动机的推力,使之能够达到较高的效率。
冷却物体用的压缩气体和所需要的压缩气体量最好用物体温度与预定的目标温度之间的偏差来表达。因此可以将物体精确地冷却到目标温度。
激活部分最好调整位置指令部分所用的正弦函数的振幅或频率之中的至少一个,以使活塞的振幅在激活时逐渐增大到目标值。因此,可以稳定激活时活塞的振动,从而避免活塞头与气缸的碰撞。
停机部分最好调整位置指令部分所用的正弦函数的振幅和频率之中的至少一个,使活塞的振幅在停机时逐渐减小,从而还能稳定停机时活塞的振动。
在按照本发明另一个方面的线性压缩机的驱动设备中,位置指令部分按正弦函数发出活塞位置指令,电流指令部分产生电流指令值,使位置检测值与位置指令值一致,而电源按照电流指令值输出一个驱动电流。当电流指令值与活塞速度之间的相位差超过容限时,频率控制部分减小电流指令值和正弦函数之中的至少一个至预定的比率,并控制正弦函数的频率,以消除相位差。每当控制频率时,就相应地减小活塞的振幅。因此,即使通过控制频率来改进效率时,也不会增大活塞的振幅,因此,可以避免活塞头与气缸内壁端的碰撞。
按照本发明再一个方面的线性压缩机的驱动设备,电流指令部分按正弦函数产生电流指令值,而振幅控制部分控制正弦函数的振幅,使活塞振幅检测值与目标值一致,而电源按照电流指令值向线性发动机输出驱动电流。当电流指令值与活塞的速度超过容限时,频率控制部分减小正弦函数的振幅至预定的比率,并控制正弦函数的频率,以消除相位差。故此,可以避免活塞头与气缸内壁端的碰撞,另外,可以简化结构。
在按照本发明再一个方面的线性压缩机的驱动设备中,位置指令部分按正弦函数发出活塞位置指令,而电流指令部分产生电流指令值,使位置检测值与位置指令值一致,而电源按照电流指令值向线性发动机输出驱动电流。振幅控制部分控制正弦函数的振幅和电流指令值的振幅之中的至少一个,使上和下死点侧的振幅中较大的一个符合目标值。因此,即使活塞的中性点偏离原点,活塞头也不会与气缸内壁端碰撞。
在按照本发明再一个方面的线性压缩机的驱动设备中,电流指令部分按照正弦函数产生电流指令值,振幅控制部分控制正弦函数的振幅使得活塞的振幅检测值与目标值一致,而电源按照电流指令值向线性发动机输出驱动电流。振幅控制部分控制正弦函数的振幅,使上、下死点振幅中较大的一个符合目标值。因此,可以避免活塞头与气缸内壁端的碰撞,另外可以简化结构。
按照按照本发明再一个方面的线性压缩机的驱动设备,位置指令部分按正弦函数发出活塞位置的指令,电流指令部分产生电流指令值,使位置检测值与位置指令值一致,而电源按照电流指令值向线性发动机输出驱动电流。偏移量控制部分控制正弦函数的偏移量,以便消除活塞中性点对原点的偏移量。因而,可以消除活塞中性点对原点的偏移量,并且,可以避免活塞头与气缸内壁端的碰撞。即使线性发动机装设两个活塞,也能高精度地用类似方法控制这两个活塞的缸头间隙。最好再设置一个振幅检测部分和振幅控制部分,振幅检测部分检测上死点侧的振幅和下死点侧的振幅,而振幅控制部分,控制正弦函数和电流指令值的振幅中的至少一个,使上、下死点侧振幅之中较大的一个符合目标值。因此,肯定可以避免活塞头与气缸内壁端的碰撞。
在按照本发明再一个方面的线性压缩机的驱动设备中,电流指令部分按照正弦函数产生电流指令值,振幅控制部分控制正弦函数的振幅,使活塞的振幅检测值符合目标值,而电源按照电流指令值向线性发动机输出驱动电流。偏移量控制部分控制正弦函数的偏移量,以便消除活塞中性点对原点的偏移量。因而,可以消除活塞中性点对原点的偏移量,并且,可以避免活塞头与气缸内壁端的碰撞。即使线性发动机装设两个活塞,也能高精度地用类似方法控制这两个活塞的缸头间隙。另外,可以简化结构。
振幅检测部分最好检测上死点侧振幅和下死点侧振幅,而振幅控制部分控制正弦函数的振幅,使上、下死点侧振幅之中的大者符合目标值。因此,肯定可以避免活塞头与气缸内壁端的碰撞。
在按照本发明再一个方面的线性压缩机的驱动设备中,检测排气阀的开放周期,并根据检测结果在规定的周期内切断驱动电流。因而,可以消除与活塞速度相位不同的无效电流,从而可以获得比先有技术更高的效率。
最好采用电流控制型电源,并直接对输出电流进行控制。所以,可以进行高度精确的控制。
最好采用电压控制型电源,用开关对从电源流向线性发动机的电流进行控制。因而,用简单的结构控制电流。
最好在排气阀开启时切断驱动电流。因而,可通过简单的控制获得高效率。
参阅下面结合附图对本发明进行的详细叙述,本发明的上述的和其他的目的、特征、方面和优点将会变得更加明显。
图1是表示按照本发明的第一个实施例的线性压缩机控制设备的结构的方框图;
图2是表示图1所示线性压缩机的结构的剖面图;
图3是表示图1所示控制设备的结构的方框图;
图4是表示图3所示控制设备的操作的流程图;
图5是表示包括在按照本发明第二个实施例的线性压缩机驱动设备内的控制设备的方框图;
图6是表示图5所示相位控制部分的结构的方框图;
图7是表示图5所示控制设备的操作的流程图;
图8是表示按照本发明第三个实施例的线性压缩机驱动设备的相位控制部分的方框图;
图9是表示包括在参照图8描述的线性压缩机驱动设备中的控制设备的操作的流程图;
图10是表示包括在按照本发明第四个实施例的线性压缩机驱动设备中的控制设备的结构的方框图;
图11是表示图10控制设备的操作的流程图;
图12是表示包括在按照本发明第五个实施例的线性压缩机驱动设备中的控制设备的结构的方框图;
图13表示激活时图12中形成的位置指令部分的操作;
图14表示停机时图12所示的位置指令部分的操作;
图15是表示图12所示控制设备的操作的流程图;
图16是图15的继续;
图17是表示按照本发明第六个实施例的线性压缩机驱动设备的结构的方框图;
图18是表示图17所示控制设备主要部分的结构的方框图;
图19是表示图18所示控制设备的操作的流程图;
图20是图19的继续;
图21是表示按照本发明第七个实施例的线性压缩机驱动设备的控制设备的主要部分的方框图;
图22是表示图21所示控制设备的操作的流程图;
图23是图22的继续;
图24是表示按照本发明第八个施例的线性压缩机驱动设备的控制设备主要部分的结构的方框图;
图25是表示图24所示控制设备的操作的流程图;
图26是图25的继续;
图27是表示图24所示线性压缩机驱动设备的改进的剖面图;
图28是表示27所示线性压缩机无负载时活塞速度v与驱动电流i之间关系的波形图;
图29是表示27所示线性压缩机有负载时活塞速度v与驱动电流i之间关系的波形图;
图30是表示按照本发明第九个实施例的线性压缩机驱动设备的结构的方框图;
图31是表示图30所示逆变器结构的电路图;
图32是表示图30所示控制设备的操作的流程图;
图33是表示图30所示线性压缩机驱动设备作用的波形图;
图34是表示按照本发明第十个实施例的线性压缩机驱动设备的结构的方框图;
图35是表示图34所示控制设备的操作的流程图。
[第一实施例]
图1是表示按照本发明的第一个实施例的线性压缩机1用的驱动设备2的结构的方框图。
参照图1,驱动设备2包括电源3、电流传感器4、位置传感器5和控制设备6。电源3向线性压缩机1的线性发动机提供驱动电流I。电流传感器4检测电源3输出电流的当前值Inow。位置传感器5直接或间接地检测线性压缩机1活塞位置的当前值Pnow。控制设备6根据电流传感器4检测的电流当前值Inow和位置传感器5检测的位置当前值Pnow向电源3输出控制信号φc,并控制电源3的输出电流I。
图2是表示线性压缩机1结构的剖面图。参照图2,线性压缩机1包括分别设在气缸外壳10上端和下端的两个气缸11a和11b、分别装在气缸11a和11b内的两个活塞12a和12b、分别面对活塞12a和12b头部而形成的两个压缩空间13a和13b,以及两套进气阀14a和14b和排气阀15a和15b,它们分别根据压缩空间内的气体压力而打开/关闭。
两个活塞12a和12b分别装在一根轴16的一端和另一端。轴16由两组直线滚珠轴承17a,17b和螺旋形弹簧18a和18b支撑,使得能够在气缸11a和11b以及外壳10内往复运动。在由活塞12a和12b头部后侧和气缸11a和11b形成的空间中,设有气体泄漏孔19a和19b,以防止不可逆压缩。
另外,线性压缩机1包括线性发动机20,用来使轴16和活塞12a和12b作往复运动。线性发动机20是一种高度可控的音圈马达,装有包括含有轭铁部分10a和永久磁铁21的固定部分的定子部分和包括线圈23和圆柱形支持件24的活动部分。轭铁部分10a形成外壳10的一部分。永久磁铁21装在轭铁部分10a的内圆周壁内。支持件24一端以可作往复运动的方式插入永久磁铁21和气缸11a外圆周壁之间,另一端固定在轴16的中心部分。线圈23以对着永久磁铁21的方式安装在所述支持件一端的位置。电源3通过螺旋弹簧形的电导线25与线圈23连接。
线性压缩机1具有谐振频率,后者取决于活塞12a和12b、轴16、线圈23和支持件24的重量、压缩空间13a和13b中气体的弹性常数、螺旋型弹簧18a和18b的弹簧常数等等。当线性发动机20被驱动而以所述谐振频率运动时,在上、下两个压缩空间13a和13b内便高效率地产生压缩气体。
图3是表示图1所示控制设备6的结构的方框图。参照图3,控制设备6包括p-v转换部分30、位置指令部分31、三个减法器32,34和36、位置控制部分33、速度控制部分35、电流控制部分37和相位控制部分38。p-v转换部分30对位置传感器5检测到的位置当前值Pnow进行微分,计算出速度当前值Vnow。位置指令部分31按照方程式Pref=A*sinωt(式中A代表振幅,而ω代表角频率),将位置指令值Pref加到减法器32。减法器32计算由位置指令部分31提供的位置指令值Pref与位置传感器5检测到的位置当前值Pnow之差Pref-Pnow,并将计算结果Pref-Pnow加到位置控制部分33。
位置控制部分33根据方程式Vref=Gv*(Pref-Pnow)(式中Gv代表增益常数)计算速度指令值Vref,并将计算结果Vref加到减法器34。减法器34计算来自位置控制部分33的速度指令值Vref和p-v转换部分30产生的速度当前值Vnow之间的差值Vref-Vnow,并将计算结果Vref-Vnow加到速度控制部分35。
速度控制部分35根据方程式Iref=(Vref-Vnow)(式中Gv代表增益常数)计算电流指令值Iref,并将计算结果Iref加到减法器36。减法器36计算来自速度控制部分35的电流指令值Iref和电流传感器4检测到的电流当前值Inow之间的差值Iref-Inow,并将计算结果Iref-Inow加到电流控制部分37。
电流控制部分37通过给电源3施加控制信号φc,控制电源3的输出电流I,使减法器36的输出Iref-Inow达到0。电源3输出电流I的控制是按照,例如,PWM(脉宽调制)或PAM(脉冲幅度调制)方法来完成的。
相位控制部分38检测p-v转换部分30产生的速度当前值Vnow和速度控制部分35产生的电流指令值Iref之间的相位差,并调整位置指令部分31中使用的方程式Pref=A*sinωt中的角频率ω和速度控制部分35中使用的方程式Iref=Gi*(Vref-Vnow)的增益常数Gi,以消除该相位差。
图4是表示图3所示控制设备6的操作的流程图。现将参照该流程图,简要地介绍图1至3所示的线性压缩机1及其所用的控制设备的操作。
首先,在步骤S1上,位置指令部分31产生位置指令值Pref,位置控制部分33产生速度指令值Vref,而速度控制部分35产生电流指令值Iref。当给线性发动机20的线圈23提供电流时,线性发动机20的活动部分开始作往复运动,于是开始产生压缩气体。
在步骤S2上,位置传感器5检测位置当前值Pnow,并将检测到的位置当前值Pnow加给减法器32和p-v转换部分30。在步骤S3上,位置控制部分33计算速度指令值Vref=Gv*(Pref-Pnow),而在步骤S4上,p-v转换部分30将位置当前值Pnow转换成速度当前值Vnow。速度当前值Vnow加给减法器34和相位控制部分38。
在步骤S5上,速度控制部分35计算电流指令值Iref=Gi*(Vref-Vnow),并将计算值Iref加给减法器36和相位控制部分38。电流控制部分37控制电源3,使电流当前值Inow与电流指令值Iref一致。
在步骤S6上,相位控制部分38检测速度当前值Vnow与电流指令值Iref之间的相位差。在步骤S7上,相位控制部分38调整增益常数Gi和位置指令值Pref的角频率,以消除速度当前值Vnow与电流指令值Iref之间的相位差。
此后,重复步骤S1至S7,迅速稳定线性压缩机1的操作状态。甚至当激活后存在负载振荡时,也可以适当地直接控制线性发动机20的推力,亦即,驱动电流I,使之能够达到高效率。
尽管在本实施例中,位置当前值Pnow是由位置传感器4检测的,而速度当前值Inow是通过对检测值的微分计算出来的,但是,也可以装设速度传感器代替位置传感器4,位置当前值Pnow可以通过对检测值Vnow的积分计算出来。或者,可以装设位置和速度传感器。
在本实施例中,在位置控制部分33的增益常数Gv和速度控制部分35的Gi之中,相位控制部分38只调整增益常数Gi。但是,也可以只调整增益常数Gv,或者两个都调整。
[第二实施例]
图5是一个方框图,表示包括在按照本发明的第二个实施例的线性压缩机1用的驱动设备中的、与图3对应的控制设备39的结构。
参照图5,控制设备39与图3所示的控制设备6不同之处在于,相位控制部分40代替了相位控制部分38。
参照图6,相位控制部分40包括零点检测部分41和42、相位检测部分43、频率控制部分44、峰值检测部分45和46、减法器47以及增益控制部分48。
零点检测部分41检测p-v转换部分30产生的速度当前值Vnow的过零点。零点检测部分42检测速度控制部分35所加的电流指令值Iref的过零点。零点检测部分41以比速度当前值Vnow采样周期足够短的采样周期对速度当前值Vnow进行采样,并检测上一次采样值与本次采样值的乘积为负值,而本次采样值为正值的事实,例如,以此检测速度当前值经过零点的事实。零点检测部分42的工作方式相似。
相位差检测部分43根据零点检测部分41检测到的速度当前值Vnow的过零点和零点检测部分42检测到的电流指令值Iref的过零点,来检测速度当前值Vnow与电流指令值Iref之间的相位差。频率控制部分44调整位置指令部分31中用的方程式Pref=A*sinωt的角频率ω,以消除相位差检测部分43所检测到的速度当前值Vnow与电流指令值Iref之间的相位差。
峰值检测部分45接收在相位差检测部分43检测到的速度当前值Vnow与电流指令值Iref之间的相位差和在位置指令部分31计算的相位指令值Pref,并检测相位差为0时的位置指令值Pref的峰值。峰值检测部分46接收相位差检测部分43检测到的速度当前值Vnow与电流指令值Iref之间的相位差和位置传感器5检测的位置当前值Pnow,并检测相位差为0时的位置当前值Pnow的峰值。
减法器47计算在峰值检测部分45检测到的位置指令值Pref的峰值和在峰值检测部分46检测到的位置当前值Pnow的峰值之间的差值。增益控制部分48调整速度控制部分所用的方程式Iref=Gi*(Vref-Vnow)的增益常数Gi,使减法器47的计算值达到0。除了这些几点以外,该操作与按照第一个实施例的线性压缩机驱动设备相同,故此不再赘述。
图7是一个流程图,表示图5和6所示控制设备39的操作。现参照该流程图,简要地介绍本实施例的线性压缩机1及其驱动设备的操作。
首先,在步骤S11上,位置指令部分31产生位置指令值Pref,位置控制部分33产生速度指令值Vref,而速度控制部分35产生电流指令值Iref。当把电流输送到线性发动机20的线圈23时,线性发动机20的活动部分开始作往复运动,于是开始产生压缩气体。
在步骤S12上,位置传感器5检测位置当前值Pnow,检测到的位置当前值Pnow送往p-v转换部分30、减法器32和相位控制部分40。在步骤S13上,位置控制部分33计算速度指令值Vref=Gv*(Pref-Pnow),而在步骤S14上,p-v转换部分30将位置当前值Pnow转换成速度当前值Vnow。速度当前值Vnow送给减法器34和相位控制部分40。
在步骤S15上,速度控制部分35计算电流指令值Iref=Gi*(Vref-Vnow),并将计算值Iref送给减法器36和相位控制部分40。电流控制部分37控制电源3,使电流当前值Inow与电流指令值Iref一致。
在步骤S16上,零点检测部分41和42检测速度当前值Vnow的过零点和电流指令值Iref的过零点,而相位差检测部分43检测速度当前值Vnow与电流指令值Iref之间的相位差。
在步骤S17上,频率控制部分44控制位置指令值Pref的角频率ω,使速度当前值Vnow与电流指令值Iref之间的相位差为0。当速度当前值Vnow与电流指令值Iref之间的相位差达到0时,峰值检测部分45和46分别相应地检测位置指令值Pref的峰值(目标值)和位置当前值Pnow的峰值。增益控制部分48确定位置当前值Pnow的峰值是否等于目标值。
当位置当前值Pnow的峰值小于目标值时,在步骤S18上,增益控制部分48增大增益Gi,而当位置当前值Pnow的峰值大于目标值时,在步骤S19上,增益控制部分48减小增益Gi。
重复步骤S16至S19,直至位置当前值Pnow的峰值等于目标值。在步骤S20上,当位置当前值Pnow的峰值等于目标值时,流程返回步骤S11。
此后,重复步骤S11至S20,使线性压缩机1的操作状态迅速稳定。即使激活后有负载振荡,也可以适当地直接控制线性发动机20的推力,亦即,驱动电流I,使之能够达到高效率。
在本实施例中,在位置控制部分33的增益常数Gv和速度控制部分35的Gi之中,相位控制部分40只调整增益常数Gi。但也可以只调整其中的增益常数Gv,或者两个都调整。
[第三实施例]
图8表示包括在按照本发明的第三个实施例的线性压缩机1用的驱动设备中的相位控制部分50的结构,与图6对应。
参照图8,相位控制部分50与图6的相位控制部分40不同之处在于,零点检测部分41和42分别被峰点检测部分51和52代替。
峰点检测部分51检测p-v转换部分30产生的速度当前值Vnow的峰点。峰点检测部分52检测由速度控制部分35所加的电流指令值Iref的峰点。峰点检测部分51以与速度当前值Vnow的采样周期相比足够短的采样周期对速度当前值Vnow进行采样,并检测上一次采样值大于再上一次采样值而且本次采样值小于上一次采样值的事实,以此检测速度当前值已经通过峰点。峰点检测部分52的工作方式相似。
在步骤S26上,相位差检测部分43根据速度当前值Vnow的峰点和电流指令值Iref的峰点,检测速度当前值Vnow与电流指令值Iref之间的相位差。步骤21到25和27到30分别与图7中的步骤11到15及17到20相同,故此不再赘述。
本实施例可以得到与第二个实施例相似的效果。
[第四实施例]
图10是一个方框图,表示包括在按照本发明的第四个实施例的线性压缩机1用的驱动设备中的控制设备53的结构,与图5对应。参照图10,控制设备53与图5的控制设备39不同之处在于,位置指令部分31被位置指令部分54代替。
位置指令部分54根据冷冻机内的目标温度Tref与冷冻机中温度调整设备(未示出)所加的冷冻机温度Tnow之间的偏差ΔT=Tref-Tnow,并根据下列表1计算容量控制比。容量控制比定义为线性压缩机1的输出对于最大输出的比率(%)。在线性压缩机1中,输出与活塞12a和12b冲程成正比,在温度偏差至少2℃时,容量控制比达到100%,而若温度偏差最大-5℃,则容量控制比达到0%。另外,位置指令部分54根据容量控制比计算活塞12a和12b的冲程,就是说,振幅A,根据振幅A、角频率ω和方程式Pref=A*sinωt产生位置指令值Pref,并将位置指令值Pref加给减法器32。
表 1
偏差 容量控制比 活塞冲程目标值
(最大100%) (对全冲程之比%)
至少2℃ 100% 100%
至少0℃ 75% 75%
至少-2℃ 50% 50%
至少-5℃ 25% 25%
至多-5℃ 0% 0%
图11是一个流程图,表示图10所示控制设备53的操作,对应于图7。
参照图11,该流程图与图7的流程图的差异在于步骤S11之前,在步骤S10上,位置指令部分54根据冷冻机内的目标温度Tref与冷冻机内的温度Tnow之间的偏差ΔT=Tref-Tnow计算位置指令值Pref的振幅A。
其他的结构和操作与第二个实施例的相同,故此不再赘述。
虽然在本实施例中本发明适用于冷冻机用的线性压缩机1,但应用并不限于此,本发明还可以应用于任何用途的线性压缩机1。例如,线性压缩机1用于空调是有效的。在那种情况下,线性压缩机1可以根据室温目标值Tref与室温Tnow之间的偏差ΔT=Tref-Tnow进行控制。
[第五实施例]
图12是一个方框图,表示包括在按照本发明的第五个实施例的线性压缩机1用的驱动设备中的控制设备55的结构,与图3对应。
参照图12,控制设备55与图3的控制设备6不同之处在于,位置指令部分31为位置指令部分56所代替。
位置指令部分56根据振幅A、角频率ω和方程式Pref=A*sinωt产生位置指令值Pref。在激活方式下、稳定操作方式下和在停机方式下用不同的方法控制和设置振幅A和角频率ω。
更具体地说,在激活方式下,位置指令值Pref的频率f=ω/2π被设置成约为无气体负载时的谐振频率的小值(例如,30Hz)。这样,效率被压低,可以防止活塞12a和12b的冲程迅速增大。振幅A根据活塞12a,12b的冲程比Rs、全冲程Amax和方程式A=Rs*Amax计算。如图13所示,每次位置当前值Pnow峰值的变化从0稳定到1时,逐步增大冲程比Rs。步数设置为预先根据经验确定的值。
在稳定操作的方式下,峰值A根据容量控制计算。例如,若压缩气体用于冷冻机的冷却,则峰值A根据冷冻机内的目标温度Tref与冷冻机内的温度Tnow之间的偏差计算。相位控制部分38控制角频率ω,使电流指令值Iref的相位与速度当前值Vnow的相位一致。因此,即使负载变化,总是能够获得高效率。
在停机方式下,根据频率比Rf、刚刚转入停机方式之前的角频率ω0和方程式ω=Rf*ω0计算角频率ω。响应停机方式的设置,不断地适中地减小频率比Rf。频率比Rf预先设置成根据经验算出的值。因此,效率适中地降低,活塞12a和12b的冲程逐渐减小。当活塞12a和12b的冲程达到全冲程一半左右时,切断电源3。
图15和16是流程图,表示控制设备55的操作。现将参照该流程图简要地介绍按本实施例的线性压缩机1及其所用驱动设备的操作。
当指定激活线性压缩机1或设置激活方式时,在步骤S31上,位置指令部分56将位置指令值Pref的频率设置成无气体负载时谐振频率附近的小值。
在步骤S32上,位置指令部分56根据冲程比Rs计算位置指令值Pref的振幅A=Rs*Amax,而在步骤S33上,位置指令部分56产生位置指令值Pref=A*sinωt。
在步骤S34上,位置传感器5检测位置当前值Pnow,并将检测到的位置当前值Pnow加给减法器32和p-v转换部分30。在步骤S35上,位置控制部分33计算速度指令值Vref=Gv*(Pref-Pnow),而在步骤S36上,p-v转换部分30将位置当前值Pnow转换成速度当前值Vnow。速度当前值Vnow加给减法器34和相位控制部分38。
在步骤S37上,速度控制部分35计算电流指令值Iref=Gi*(Vref-Vnow),并将算出的值Iref加给减法器36和相位控制部分38。电流控制部分37控制电源3,使电流当前值Inow与电流指令值Iref一致。因此,当向线性发动机20的线圈23提供电流时,线性发动机20的活动部分开始往复运动,于是开始产生压缩气体。
在步骤S38上,位置指令部分56在位置当前值Pnow的峰值偏差稳定下来时,冲程比Rs增大一步,然后重复步骤S31至S38,直至冲程比Rs达到1为止。
在步骤S39上,当冲程比Rs达到1而位置当前值Pnow的峰值变化稳定下来时,取消激活方式,设置稳定操作方式。
在步骤S40上,位置指令部分56计算与容量控制对应的位置指令值Pref的振幅A。步骤S41至S45与步骤S33至S37相同。更具体地说,在步骤S41上,位置指令部分56产生位置指令值Pref=A*sinωt,在步骤S42上,位置传感器5检测位置当前值Pnow,而在步骤S43上,位置控制部分33计算速度指令值Vref。在步骤S44上,p-v转换部分30产生速度当前值Vnow,而在步骤S45上,速度控制部分35计算电流指令值Iref。控制电源3,使电流当前值Inow与电流指令值Iref一致。
在步骤S46上,相位控制部分38检测速度当前值Vnow与电流指令值Iref之间的相位差。在步骤S47上,相位控制部分38调整控制增益常数Gi和位置指令值Pref的角频率ω,以消除速度当前值Vnow与电流指令值Iref之间的相位差。此后,在稳定操作方式下,重复步骤S40至S47。
指定停止线性压缩机1时,取消稳定操作方式,并设置停机方式,在步骤S48上,位置指令部分56根据频率比Rf计算位置指令值Pref的角频率ω=Rf*ω0。
步骤S49至S53与步骤S33值S37相同。更具体地说,在步骤S49上,位置指令部分56产生位置指令值Pref=A*sinωt,在步骤S50上,位置传感器5检测位置当前值Pnow,而在步骤S51上,位置控制部分33计算速度指令值Vref。在步骤S52上,p-v转换部分30产生速度当前值Vnow,而在步骤S53上,速度控制部分35计算电流指令值Iref。控制电源3,使电流当前值Inow与电流指令值Iref一致。
在步骤S54上,位置指令部分56不断地适中地减小频率比Rf,然后重复步骤S48至S54,直至位置指令值Pref的冲程约达到全冲程的一半为止。
在步骤S55上,当位置当前值Pnow的冲程约达到全冲程的一半时,位置指令部分56切断电源3。
虽然在本实施例中,位置指令值Pref的角频率ω在激活时设置为小值,而位置指令值Pref的振幅A逐步增大,但其操作方式不限于此。可以任选地控制位置指令值Pref的角频率ω和振幅A之中的至少一个,只要活塞12a和12b的冲程可以逐步增大。例如,可以将角频率ω设置成谐振值,然后逐步增大振幅A。
虽然在本实施例中,停机时,适中地减小位置指令值Pref的角频率ω,但不限于此。可以任选地控制位置指令值Pref的角频率ω和振幅A之中的至少一个,只要活塞12a和12b的冲程可以逐步减小。例如,可以只减小振幅A,而不减小角频率ω。
[第六实施例]
在这样的线性压缩机中,当线性发动机的驱动电流和活塞速度同相时,获得高效率,而在顶部间隙(活塞头与气缸内壁端之间的最近距离)维持最小值(约0.1mm)时,获得的效率最高。
因此,可以控制驱动电流的频率,使线性发动机的驱动电流的相位与活塞速度的相位一致。但是,若是控制驱动电流的频率,而同时顶部间隙维持最小值(例如,约0.1mm),就能改善损耗,而活塞的振幅变大,引起活塞头碰撞气缸内壁端部的问题。
可以控制活塞的振幅,使顶部间隙具有最小值。但是,在有两个活塞的线性压缩机中,由于阀门等的不对称,活塞实际的中性点可能朝着上或下死点侧偏离设计的中性点(原点)。在这样情况下,很难以高精度同时控制两个活塞的顶部间隙。
在本实施例中这些问题将被解决。
图17是一个方框图,表示按照本发明第六个实施例的线性压缩机1用的驱动设备57的结构。
参照图17,驱动设备57包括电源3、位置传感器5和控制设备58。电源3向线性压缩机1的线性发动机提供驱动电流I。位置传感器5直接或间接地检测线性压缩机1活塞的位置,并按照活塞位置向控制设备58输出电信号Pa。可以使用激光位移计作为位置传感器5。控制设备58根据位置传感器5的输出向电源3输出控制信号φc。
图18是一个方框图,表示图17所示控制设备58主要部分的结构。参照图18,控制设备58包括位置指令值产生部分60、位置·速度控制部分61、电流指令值产生部分62、位置·速度检测部分63、上和下死点检测部分64、电流·速度相位差检测部分65、电流增益控制部分66、振幅中性位置控制部分67和频率控制部分68。
位置·速度检测部分63以与活塞12a和12b的振荡周期相比足够短的采样周期(例如,150微秒)对位置传感器5的输出进行采样,并通过对采样值的A/D转换产生位置当前值Pnow,并通过对位置当前值Pnow的微分计算速度当前值Vnow。
上与下死点检测部分64根据位置·速度检测部分63所产生的位置当前值Pnow的最大值和最小值,检测上死点与活塞12a和12b的原点之间的上死点侧的振幅以及下死点与所述原点之间的下死点侧的振幅。上和下死点侧振幅的检测在每次位置指令值Pref一个周期完成时、也就是每次位置指令值Pref通过过零点时进行。
电流·速度相位差检测部分65检测位置·速度检测部分63产生的速度当前值Vnow与位置指令值产生部分62产生的电流指令值Iref之间的相位差。相位差的检测在每次位置当前值Pnow一个周期结束时、也就是每次位置当前值Pnow通过过零点时进行。
位置指令值产生部分60根据存储在存储器的正弦表、振幅A、角频率ω、偏移量B和方程式Pref=A*sinωt+B(正弦函数)产生位置指令值Pref,并将产生的位置指令值Pref加给位置·速度控制部分61。
位置·速度控制部分61根据位置指令值产生部分60产生的位置指令值Pref与位置·速度检测部分63产生的位置当前值Pnow之间的偏差Pref-Pnow产生速度指令值Vref,并根据速度指令值Vref与位置·速度检测部分63产生的速度当前值Vnow之间的偏差Vref-Vnow产生速度控制值Vc。
电流指令值产生部分62根据位置·速度控制部分61产生的速度控制值Vc、电流增益Gi和方程式Iref=GiVc产生电流指令值Iref,将电流指令值Iref转换成控制信号φc,并加给电源3。对来自电源3的输出电流I的控制,例如,按照脉宽调制(PWM)法或脉幅调制(PAM)法进行。
电流增益控制部分66比较上和下死点检测部分64检测到的上死点侧的振幅和下死点侧的振幅,并将上和下死点侧的振幅中的较大者视为最大振幅当前值Anow。电流增益控制部分66在活塞12a和12b的每一个振动周期控制用于电流指令值产生部分62的电流增益值Gi,使最大振幅当前值Anow等于预定的最大振幅目标值Aref。另外,电流增益控制部分66在活塞12a和12b经过几百(例如,300)个振动周期时确定一次电流·速度相位差检测部分65检测的相位差是否超过预定的容限,若超过了,则将电流指令值产生部分62用的电流增益值Gi减小百分之几。由于位置·速度控制部分61除了对位置和速度进行控制之外,还对最大振幅进行控制,并在进行频率控制之前将电流增益减小几个百分点,所以肯定可以避免活塞12a和12b的头部与气缸11a和11b内壁端部的碰撞。
振幅中性位置控制部分67把上和下死点侧振幅检测部分64检测的上死点侧振幅与下死点侧振幅加以比较,并在每次位置指令值Pref完成一个周期时控制位置指令值产生部分60用的偏移量B,使上和下死点侧振幅之间的差值减小。更具体地说,当上死点侧振幅大于下死点侧振幅时,振幅中性位置控制部分67朝负侧(较低的方向)修正偏移量B,而上死点侧振幅小于下死点侧振幅时,振幅中性位置控制部分67朝正侧(较高的方向)修正偏移量B。由于由设备的诸如阀门不对称性的特点引起的偏移量B大致上是一个常数,所以把对偏移量B的控制量每次设置成小的值(例如,1微末)。因为偏移量B是这样控制的,两个活塞的顶部间隙就可以类似地高精度地控制。
频率控制部分66检测电流·速度相位差检测部分65检测的相位差是否超过预定的容限,若超过了,则校正用于位置指令值产生部分60用的角频率ω,以消除相位差。相位差的校正大体上与电流增益控制部分66将电流增益Gi减小几个百分点同时进行。因此,可以避免由于相位校正而改善效率时活塞12a和12b的振幅加大而引起的活塞12a和12b头部与气缸11a和11b内壁端部的碰撞。
图19和20是流程图,表示图18的控制设备58的操作。现参照该流程图描述按本实施例的线性压缩机1及其驱动设备57的操作。
首先,位置指令值产生部分60产生位置指令值Pref,位置·速度控制部分61产生速度控制值Vc,电流指令值产生部分62产生控制信号φc。当电源3向线性发动机20的线圈23提供电流时,线性发动机20的活动部分开始往复运动,于是开始产生压缩气体。
在步骤S61上,位置·速度检测部分63读取位置数据,亦即位置传感器5的输出,而在步骤S62上,位置·速度检测部分63计算位置当前值Pnow和速度当前值Vnow。
在步骤S63上,位置·速度控制部分61完成速度控制。更具体地说,位置·速度控制部分61根据速度指令值Vref和速度当前值Vnow之间的偏差计算速度控制值Vc,并将其加到电流指令值产生部分62上。
在步骤S64上,电流指令值产生部分62产生电流指令值Iref,它是速度控制值Vc和电流增益Gi的乘积,而在步骤S65上,电流指令值产生部分62根据电流指令值Iref把电流指令数据,亦即控制信号φc输出给电源3。
在步骤S66上,包括在控制设备58内的第一计数器(未示出)的计数值加一(+1),而在步骤S67上,确定第一计数器的计数值是否达到设定值(例如,3)。
若第一计数器的计数值在步骤S67上达到设定值,则在步骤S68上,根据位置指令值产生部分60中的位置校正量和频率设定值产生振幅A和角频率ω,另外,根据正弦表、振幅A、偏移量B和角频率ω产生位置指令值Pref=Asinωt+B。在步骤S69上,位置·速度控制部分61完成位置控制。更具体地说,位置·速度控制部分61根据位置指令值Pref和位置当前值Pnow之间的偏差产生速度指令值Vref。完成位置控制之后,在步骤S70上,将第一计数器的计数值复位。
在步骤S67上,若第一计数器的计数值尚未达到设定值,则不执行步骤68至70。
在步骤S71上,确定位置指令值Pref的一个周期是否结束。
在步骤S71上,若位置指令值Pref的一个周期已经结束,则在步骤S72上,上与下死点侧检测部分64根据位置当前值Pnow的最大值和最小值检测活塞12a和12b上死点侧振幅和下死点侧振幅。
在步骤S73上,比较上、下死点侧振幅的量值,当上死点侧振幅大于下死点侧振幅时,在步骤S74上,振幅中性位置控制部分67把负的校正量设为偏移量B的校正量,而在步骤S75上,把上死点侧振幅设为最大振幅当前值Anow。
作为步骤73的量值的比较结果,当下死点侧振幅大于上死点侧振幅时,在步骤S76上,振幅中性位置控制部分67把正的校正量设为偏移量B的校正量,而在步骤S77上,把下死点侧振幅设为最大振幅当前值Anow。
在步骤S78上,电流增益控制部分66控制与设置电流增益Gi,使最大振幅当前值Anow与最大振幅目标值Aref一致,而此后在步骤S79上,在上与下死点检测部分64中,将位置当前值Pnow的最大值和最小值复位。
若在步骤S71上确定位置指令值Pref的一个周期已经结束,则不执行步骤S72至S79。
此后,在步骤S80上,上与下死点检测部分64检测与保持位置当前值Pnow的最大值和最小值。在步骤S81上,电流·速度相位差检测部分65确定位置当前值的一个周期是否已经结束。
若在步骤S81上确定位置当前值的一个周期已经结束,则在步骤S82上,电流·速度相位差检测部分65检测电流指令值Iref与速度当前值Vnow之间的相位差。
此后,在步骤S83上,将第二计数器的计数值(未示出)加一,在步骤S84上,确定第二计数器的计数值是否达到设定值(300)。
若在步骤S84上确定第二计数器的计数值达到了设定值,则在步骤S85上,确定电流指令值Iref与速度当前值Vnow之间的相位差是否在容限范围之内。
若在步骤S85上确定相位差超出容限,在步骤S86上,频率控制部分68控制和设置位置指令值Pref的频率,并在步骤S87上,电流增益控制部分66将电流指令值Iref的电流增益Gi减小几个百分点。
若在步骤S85上确定相位差在容限以内,则不执行步骤S86和S87。
此后,在步骤S88上,将第二计数器的计数值复位。若在步骤S81上确定位置当前值Vnow的一个周期尚未结束,则不执行步骤S82至S88。若在步骤S84上确定第二计数器的计数值尚未达到设定值,则不执行步骤S85至S88。
此后,在步骤S89上,确定控制是否已经完成,而若确定控制已经完成,则结束控制。若尚未完成,则流程返回步骤S61。
在本实施例中,当为了消除电流指令值Iref与速度当前值Vnow之间的相位差而控制位置指令值Pref的频率时,将电流控制值Iref=GiVc的电流增益Gi减小几个百分点。因此,即使通过位置指令值Pref的频率控制来改善损耗、并且增大活塞12a和12b的振幅,也能避免活塞12a和12b头部与气缸11a和11b的内壁端部碰撞。
另外,控制电流指令值Iref的电流增益Gi,使活塞12a和12b上和下死点侧振幅之中的大者位于最大振幅目标值Aref上,因此,即使活塞12a和12b的中性点的实际位置偏离设计中性点(原点),也能避免活塞12a和12b头部与气缸11a和11b的内壁端部碰撞。
另外,检测活塞12a和12b实际中性点离开原点的偏移量B,并控制位置指令值Pref的偏移量B,以消除偏移量B,因此,两个活塞12a和12b头部的间隙都能用类似方法高度精确地控制。
在本实施例中,电流·速度相位差检测部分65检测电流指令值Iref与速度当前值Vnow之间的相位差,控制位置指令值Pref的频率,以消除该相位差。但是,控制的方法并不限于此。可以检测电流指令值Iref与位置当前值Pnow之间的相位差,可以控制位置指令值Pref的频率,使相位差达到90°。
[第七实施例]
图21是表示根据本发明的第七个实施例的线性压缩机驱动设备的结构的方框图。
参照图21,线性压缩机驱动设备不同于第六实施例,区别在于控制设备58被控制设备70代替,而且不控制电流指令值Iref的电流增益Gi,而控制位置指令值Pref的振幅A。
控制设备70对应于控制设备58,而且电流增益控制部分66被位置指令值振幅控制部分71代替。位置指令值振幅控制部分71把上与下死点检测部分64检测的上死点侧振幅与下死点侧振幅加以比较,利用上与下死点侧振幅中的大者作为最大振幅当前值Anow,并控制,并在活塞12a和12b的每个振荡周期控制用于位置指令值产生部分60中的振幅A的值,使最大振幅当前值Anow等于预先确定的最大振幅目标值Aref。
另外,位置指令值振幅控制部分71每当经过活塞12a和12b的几百(例如,300)个振动周期时确定一次电流·速度相位差检测部分65检测到的相位差是否超过预定的容限,若超过,则将用于位置指令值产生部分60中的振幅值减小几个百分点。
图22和23是流程图,表示图21所示线性压缩机驱动设备的操作。
图22和23的流程图与图19和20不同之处在于,执行步骤S64’,S68’,S78’和S77’,而不执行步骤S64,S68,S78和S77。
更具体地说,在步骤S64’上,电流指令值产生部分60计算电流指令值Iref,后者是速度控制值Vc和电流增益Gi的乘积。电流增益Gi是一个常数。在步骤S68’上,位置指令值产生部分60产生位置指令值Pref=Asinωt+B。在这里,振幅A、角频率ω和偏移量B分别都是变量。
在步骤S78’上,位置指令值振幅控制部分71控制和设置位置指令值Pref的振幅A,使活塞12a和12b最大振幅当前值Anow等于最大振幅目标值Aref。在步骤S77’上,位置指令值振幅控制部分71将位置指令值Pref的振幅A减小几个百分点。其他结构和操作与第六实施例的相同,故此不再赘述。
在本实施例中,也可以达到类似于第六实施例的效果。
[第八实施例]
图24是一个方框图,表示根据本发明的第八个实施例的线性压缩机驱动设备的结构。
参照图24,线性压缩机驱动设备与第六实施例不同之处在于,控制设备58为控制设备72所代替,而且结构简化了。
在控制设备72中,控制设备58的位置·速度控制部分62去掉了,而位置指令值产生部分60为电流基本值产生部分73所代替。电流基本值产生部分73根据存储在存储器中的正弦表、振幅A’、角频率ω’和偏移量B’以及方程式Ic=A’sinω’t+B’(正弦函数)产生电流基本值Ic,并将产生的电流基本值Ic加给电流指令值产生部分62。
电流指令值产生部分62根据电流基本值产生部分73产生的电流基本值Ic、电流增益Gi和方程式Iref=GiIc产生电流指令值Iref,并将电流指令值Iref转变成控制信号φc,并加给电源3。
振幅中性位置控制部分67控制电流基本值Ic的偏移量B’,而不是位置指令值Pref的偏移量B,而频率控制部分68控制电流基本值Ic的频率,而不是位置指令值Pref的频率。
图25和26是流程图,表示图24所示线性发动机驱动设备的操作。
在步骤S91上,位置·速度检测部分63读入位置数据,亦即位置传感器4的输出Pa,而在步骤S92上,位置·速度检测部分63计算位置当前值Pnow和速度当前值Vnow。
在步骤S93上,电流指令值产生部分62产生电流指令值Iref,它是电流基本值Ic与电流增益Gi的乘积,而在步骤S94上,电流指令值产生部分62按照电流指令值Iref向电源3输出电流指令数据,亦即控制信号φc。
此后,在步骤S95上,在电流基本值产生部分73中,根据位置校正量和频率设定值产生振幅A’和角频率ω’,另外,根据正弦表、振幅A’、偏移量B’和角频率ω’产生电流基本值Ic=A’sinω’t+B’。
后面的步骤S96至S104与图19和20所示的步骤S71至S89相同,故此不再赘述。
在本实施例中,也可以得到类似于第六实施例的效果,而且可以简化控制设备的结构。
尽管本发明用于本实施例中具有两个活塞的线性压缩机中,但是,涉及在频率控制中临时减小振幅的本发明,在具有一个活塞的线性压缩机中也是有效的。
图27是一个剖面图,表示单活塞型线性压缩机80的结构。参照图27,线性压缩机80包括气缸81、装在气缸81内可作往复运动的活塞82、活塞82的头部和气缸81内壁端部之间形成的压缩空间83,以及进气和排气阀84和85,后两者按照压缩空间83的气体压力而开启/关闭。
线性压缩机80还包括用来使活塞82作往复运动的线性发动机86,和支持活塞82作往复运动的活塞弹簧91。线性发动机86包括圆柱形轭铁部分87、具有绕制的线圈的定子88和89,和具有圆柱形永久磁铁的活动体90。以同气缸81同心的方式设置轭铁部分87,并且轭铁部分87的一端固定在气缸81的一端上。定子88设置在气缸81的外圆周壁上,而定子89设置在轭铁部分87的内圆周壁上。活动体90插在定子88和89之间,可作往复运动,而其一端固定在活塞82的一端上。活塞弹簧91的圆周部分固定在轭铁部分87另一端表面上,而其中心部分固定在活塞82的一端上。
活塞82具有谐振频率,后者是根据活塞82和活动体90的重量、基于压缩空间83中气体压力变化的气体弹力的弹力常数、活塞弹簧91的弹力常数等等来确定的。电源3向线性发动机86的定子88和89的线圈提供具有谐振频率的驱动电流I。
这些部件81至91都装在外壳93内,中间设置安装弹簧92,作为声与振动的绝缘。
电源3向线性发动机86定子88和89的线圈提供驱动电流I时,磁力作用在活动体90的永久磁铁上,而活动体90和活塞92作往复运动。由于活塞82的往复运动,膨胀了的气体通过阀门84被吸入压缩空间83,而在压缩空间83中产生的压缩了的气体通过排气阀85送出。
虽然在图27中示出了线性发动机86的线圈被固定在其中的线圈固定型线性压缩机80,但是线圈活动型线性压缩机或VCK型线性压缩机也可以采用。
[第九实施例]
在图27的线性压缩机80中,驱动电流i是线性发动机86的推力,亦即活塞82的加速度。因此,如图28所示,当驱动电流i的相位完美地与活塞82的速度相位一致时,达到最高效率。
但是,这种状态只有在线性压缩机80无任何负载的情况下工作时,或者在线性发动机86线圈的圈数(number of wrapping)增大而极端增大线圈电感时,才能实现。
在正常的使用状态下,例如,排气阀85开启时负载变动很大。因此,如图29所示,驱动电流i的相位偏离活塞82速度v的相位,使效率降低。
在线圈活动型线性压缩机中,增大线性发动机86线圈的圈数导致活动部分的重量增大,从而圈数不能过分增大。
本实施例解决了这个问题。
图30是一个方框图,表示按照本发明第九个实施例的线性压缩机80用的驱动设备的结构。
参照图30,线性压缩机80的驱动设备包括转换器和平滑滤波电容部分(直流电源)101、逆变器102、电流传感器103、位置传感器104和控制设备105,控制设备105包括电流指令部分106、通/断指令部分107、操作控制部分108和电流控制部分109。
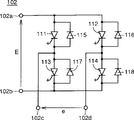
直流电源101输出一个预定的DC电压E给逆变器102。逆变器102由控制设备105的电流控制部分109进行PWM(脉宽调制)控制,它将DC电压E转换成上述谐振频率的AC电压e,加给线性压缩机80。如图31所示,逆变器102包括接成桥式电路的四组闸门关断可控硅整流器和反馈二极管111,115;112,116;113,117;114,118。输出端子102c和102d通过电流传感器103连接到线性压缩机80的线性发动机86的线圈。控制输出端子102c和102d之间的电压e,使流到线性发动机86线圈的是正弦波电流i。
电流传感器103检测逆变器102的输出电流I,并将检测结果加给控制设备105的电流控制部分109。位置传感器104直接或间接地检测线性压缩机80活塞82的位置,并将检测结果加给控制设备105的电流指令部分106和通/断指令部分107。激光位移计、线性速度传感器、霍耳元件等均可用作位置传感器104。
控制设备105的电流指令部分106根据位置传感器104的检测结果计算电流指令值is,并将计算值加给操作控制部分108。电流指令部分106根据位置传感器104检测到的位置与目标位置之间的偏差控制电流指令值is。
通/断指令部分107根据位置传感器104的检测结果确定排气阀85的开启周期,根据确定的结果计算通/断指令值φ。在排气阀85开启时通/断指令值φ用作发出切断驱动电流i(电流断)的指令信号,而在其他周期时它用作发出供给驱动电流i(电流通)的指令信号。
活塞82头部通过中性点并经过一段预定的时间之后排气阀随着压缩空间83内气体压力增大而开启,而活塞82头部开始下降时关闭。因此,根据位置传感器104的检测结果,就可以确定排气阀85的开启周期。
操作控制部分108在通/断指令部分107发出通/断指令值φ/切断电流的周期内,给电流控制部分109发出切断电流的指令,而在通/断指令值φ指令接通电流的周期内、给电流控制部分109发出接通电流的指令,并将电流指令部分106所加的电流指令值is加给电流控制部分109。
电流控制部分109在操作控制部分108发出切断电流指令期间通过停止逆变器102的脉冲输出而切断驱动电流i。电流控制部分109控制逆变器102的脉冲输出,在操作控制部分108发出接通电流指令期间从而使位置传感器103检测到的电流i与电流指令值is一致。
图32是一个流程图,表示图30所示驱动设备的操作。现将参照图32简要地描述线性压缩机80的驱动设备的操作。
DC电源101将DC电压E加给逆变器102,逆变器102将驱动电流I加给线性转换器80,以此驱动线性压缩机90。
在步骤S121上,电流指令部分106和通/断指令部分107中的每一个都通过位置传感器104检测活塞82的位置。在步骤S122上,电流指令部分106根据位置传感器104的检测结果计算电流指令值is,在步骤S123上,通/断指令部分106根据位置传感器104的检测结果计算通/断指令值φ。电流指令值is和通/断指令值φ加给操作控制部分108。
在步骤S124上,操作控制部分108根据通/断指令值φ确定电流是否切断,若确定电流已经切断,则在步骤S125上,向电流控制部分109发出切断电流的指令。若在步骤S124上确定电流i并未切断,则在步骤S126上操作控制部分108向电流控制部分109发出接通电流的指令,并把来自电流指令部分106的电流指令值is加给电流控制部分109。
在步骤S127上,电流控制部分109通过电流传感器103检测驱动电流i,并在步骤S128上,电流控制部分109根据切断电流的指令停止逆变器102的脉冲输出,并切断驱动电流i,并且,根据电流接通指令,控制逆变器102的脉冲输出,使电流传感器108检测到的电流值i与电流指令值is一致。当电流i切断时,供给的电力为0,因此,活塞82只受机械系统的运动方程式的约束而运行。
在步骤S129上,控制设备105确定控制过程是否已经完成,若尚未完成,则控制回到步骤S121。
图33是一个波形图,对应于图29,表示活塞82的速度v、驱动电流i和压缩空间83内的压力p。在排气阀85开启期间驱动电流i是切断的,所以消除了相位与速度v不同的无效电流,故能获得高于先有技术的效率。
在这个实施例中,驱动电流i仅在排气阀85开启期间切断。但是,电流i可以在活塞82的速度达到最大值之后直至速度v达到0的整个期间切断,就是说,活塞82达到中性点之后直至它达到上死点为止切断。或者,电流i也可以在从速度v达到最大值之后直至排气阀85开启为止的任意一个时间点起,至速度v达到0的时间点的周期内切断。可以在从排气阀85开启直至排气阀85关闭不久的一段时间之后,将电流i设置为切断。最好在效率接近最大值期间将电流i切断,电流i易于控制。
[第十实施例]
图34是一个方框图,表示按照本发明第十实施例的线性压缩机80的驱动设备的结构。在图34中,线性压缩机80的驱动设备包括交流电源121、开关122、位置传感器123和控制设备124,而控制设备124包括电压指令部分125、电压控制部分126、通/断指令部分127和开关控制部分128。
交流电源121的振幅由控制设备124的电压控制部分126控制,它将上述谐振频率的电压e通过开关122加给线性压缩机130的线性发动机136的线圈。
开关122由控制设备124的开关控制部分128控制,并在排气阀85开启期间切断从交流电源121流到线性压缩机80的电流i。位置传感器123直接或间接地检测线性压缩机80的活塞82的位置,并将检测结果加给控制设备124的电压指令部分125和通断指令部分127。
控制设备124的电压指令部分125根据位置传感器123的检测结果计算电压指令值es并将它加给电压控制部分126。电压指令部分125根据位置传感器123的检测结果检测活塞82的上死点,若活塞82的上死点低于预定位置,则增大电压指令值es,而若活塞82的上死点高于预定位置,则减小电压指令值es。电压控制部分126按照电压指令部分125所加的电压指令值es控制交流电源121输出电压的振幅。
通/断指令部分127根据位置传感器123的检测结果确定排气阀85的开启周期,根据此确定的结果计算通/断指令值φ,并将它加给开关控制部分128。通/断指令值φ用作在排气阀85开启期间命令切断电流的指令信号,而在其他时间内用作命令接通电流的指令信号。开关控制部分128在通断指令部分所加的通断指令值φ指令要切断电流的周期内使开关122变成非导电状态,而在其他时间内使开关122处于导电状态。
图35是一个流程图,表示图34所示控制设备的操作。现将参照图35简要地描述线性压缩面的驱动设备的操作。交流电源121将交流电压e通过开关122加给线性压缩机80,于是线性压缩机80被驱动。
在步骤S131上,电压指令部分125和通断指令部分127中的每一个都通过位置传感器123检测活塞82的位置。在步骤S132上,电压指令部分125根据位置传感器123的检测结果计算电压指令值es,而在步骤S133上,电压控制部分126按照电压指令值es控制交流电源121的输出电压e。
在步骤S134上,通断指令部分127计算通断指令值φ,并将其加给开关控制部分128。在步骤S135上,开关控制部分128确定是否应该切断电流,若确定要切断电流,则在步骤S136发出使开关断开的指令,从而使开关处于非导电状态。若在步骤S135确定不要切断电流,则在步骤S137发出使开关接通的指令,从而使开关处于导电状态。
控制设备124在步骤S138确定控制过程是否已经完成,若未完成,则流程返回S131。
在这个实施例中,和第九个实施例类似,也可以消除与活塞82的速度v具有相位差的无效电流i,从而能够获得比先有技术高的效率。
尽管对本发明已经作了描述并详细地举例说明,但是,显然这只是作为举例说明和例子,不起限制作用,本发明的精神和范围只受后附权利要求书的条文限制。
Claims (22)
1.一种其活塞由线性发动机驱动在气缸内往复运动产生压缩气体的线性压缩机的驱动设备,其特征在于包括:
电源(3),其输出电流可控,用来驱动所述线性发动机;
位置指令装置(31),用来按正弦函数发出所述气缸内所述活塞位置的指令;
位置检测装置(5),用来检测所述活塞在所述气缸内的位置;
速度指令装置(33),用来根据所述位置指令装置指令的位置与所述位置检测装置所检测的位置之间的差值发出所述活塞速度的指令;
速度检测装置(30),用来检测所述活塞的速度;
电流指令装置(35),用来根据所述速度指令装置指令的速度与所述速度检测装置检测的速度之间的差值向所述电源发出输出电流的指令;
电流检测装置(4),用来检测所述电源的输出电流;
电流控制装置(37),用来控制所述电源的输出电流,使所述电流检测装置所检测的电流与所述电流指令装置指令的电流一致;
相位差检测装置(38),用来检测表示由所述速度检测装置检测的所述活塞的速度的值与表示由所述电流指令装置指令的所述电源输出电流的值之间的相位差;以及
频率调整装置(38),用来调整所述位置指令装置用的所述正弦函数的频率,以消除所述相位差检测装置所检测的相位差。
2.按照权利要求1的线性压缩机的驱动设备,其特征在于,所述速度检测装置(30)通过对所述位置检测装置(5)的检测结果进行微分来检测所述活塞的速度。
3.按照权利要求1的线性压缩机的驱动设备,其特征在于:
所述速度检测装置(33)通过把所述位置指令装置(31)所指令的位置与所述位置检测装置(5)所检测的位置之间的差值乘以第一增益常数计算所述活塞的速度指令值,并根据该计算值指令所述活塞的速度。
所述电流指令装置(35)通过把由所述速度指令装置(33)指令的速度与由所述速度检测装置(5)检测的速度之间的差值乘以第二增益常数而计算所述电源(3)的输出电流,并根据该计算值对所述电源发出输出电流的指令;
线性压缩机的所述驱动设备还包括:
增益调整装置(38),用来调整所述速度指令装置所用的第一增益常数和所述电流指令装置所用的所述第二增益常数之中的至少一个,以消除所述相位差检测装置(38)所检测的相位差。
4.按照权利要求1的线性压缩机的驱动设备,其特征在于:
所述速度检测装置通过将由所述位置指令装置(31)指令的位置与由所述位置检测装置(5)检测的位置之间的差值乘以第一增益常数而计算速度指令值,并根据该计算值发出所述活塞的速度的指令;
所述电流指令装置(35)通过把由速度指令装置(33)指令速度与由所述速度检测装置检测的速度之间的差值乘以第二增益常数而计算所述电源(3)的输出电流,并根据该计算值发出所述电源输出电流的指令;
线性压缩机的所述驱动设备还包括:
峰值差检测装置(45-47),用来检测由所述位置指令装置指令的所述气缸中所述活塞的位置的峰值与由所述位置检测装置检测的位置峰值之间的差值;以及
增益调整装置(48),用来调整所述速度指令装置所用的第一增益常数和所述电流指令装置所用的第二增益常数之中的至少一个,以消除由所述峰值差检测装置检测到的峰值差。
5.按照权利要求4的线性压缩机的驱动设备,其特征在于:
所述相位差检测装置(41-43)检测由所述速度检测装置检测的所述活塞的速度的过零点以及由所述电流指令装置指令的所述电源输出电流的过零点,并根据该检测结果检测所述相位差。
6.按照权利要求4的线性压缩机的驱动设备,其特征在于:所述相位差检测装置(51,52,43)检测由所述速度检测装置检测的所述活塞的速度的峰点以及由所述电流指令装置指令的所述电源输出电流的峰点,并根据该检测结果检测所述相位差。
7.按照权利要求1的线性压缩机的驱动设备,其特征在于还包括:
振幅调整装置(54),用来按照要求的压缩气体量调整所述位置指令装置所用的所述正弦函数的振幅。
8.按照权利要求7的线性压缩机的驱动设备,其特征在于:
所述压缩气体用来冷却物体,以及
所述压缩气体的要求的量用所述物体的温度与预定的目标温度之间的偏差来表达。
9.按照权利要求1的线性压缩机的驱动设备,其特征在于还包括:
激活装置(56),它响应所述线性压缩机的激活指令,调整所述位置指令装置所用的所述正弦函数的振幅和频率之中的至少一个,使所述活塞的振幅逐渐增大至预定的目标值;
所述频率调整装置(38)随着所述线性压缩机的激活的完成而被激活。
10.按照权利要求9的线性压缩机的驱动设备,其特征在于:
响应所述线性压缩机的停机指令而停用所述频率调整装置(38),
线性压缩机的所述驱动设备还包括:
停机装置(56),它响应所述线性压缩机的停机指令而调整所述位置指令装置所用的所述正弦函数的振幅和频率之中的至少一个,使所述活塞的振幅逐渐减小。
11.一种其活塞由线性发动机驱动在气缸内往复运动产生压缩气体的线性压缩机的驱动设备,其特征在于包括:
电源(3),用来按照电流指令值向所述线性发动机输出驱动电流;
位置指令装置(60),用来按正弦函数发出所述气缸内所述活塞位置的指令;
位置检测装置(4,63),用来检测所述活塞在所述气缸内的位置;
电流指令装置(61,62),用来产生所述电流指令值并把它加到所述电源,使所述位置检测装置所检测的位置与所述位置指令装置指令的位置一致;
速度检测装置(4,63),用来检测所述气缸内所述活塞的速度;
相位差检测装置(65),用来检测由所述电流指令装置产生的电流指令值与由所述速度检测装置检测的速度之间的相位差;以及
频率调整装置(66,68),若由所述相位差检测装置检测到的相位差超过预定的容限,则用来减小由电流指令装置产生的电流指令值和用于所述位置指令装置的所述正弦函数的振幅之中的至少一个至预定的比率,并控制所述正弦函数的频率,以消除所述相位差检测装置所检测的相位差。
12.一种其活塞由线性发动机驱动在气缸内往复运动产生压缩气体的线性压缩机的驱动设备,其特征在于包括:
电源(3),用来按照电流指令值向所述线性发动机输出驱动电流;
电流指令装置(62,73),用来按照正弦函数产生并向所述电源施加所述电流指令值;
振幅检测装置(4,63,64),用来检测所述气缸内的所述活塞的振幅;
速度检测装置(4,63),用来检测所述气缸内所述活塞的速度;
相位差检测装置(65),用来检测所述电流指令装置所产生的电流指令值与所述速度检测装置所检测的速度之间的相位差;
振幅控制装置(66),用来控制所述电流指令装置所用正弦函数的振幅,使振幅检测装置所检测的振幅与预定的目标值一致;以及
频率控制装置(66,68),若所述相位差检测装置所检测的相位差超过预定的容限,则用来将电流指令装置所用的所述正弦函数的振幅减小至预定的比率,并控制所述正弦函数的频率,以消除所述相位差。
13.一种其活塞由线性发动机驱动在气缸内往复运动产生压缩气体的线性压缩机的驱动设备,其特征在于包括:
电源(3),用来按照电流指令值向所述线性发动机输出驱动电流;
位置指令装置(60),用来按正弦函数发出所述气缸内所述活塞位置的指令;
位置检测装置(4,63),用来检测所述气缸内所述活塞的位置;
振幅检测装置(4,63),用来根据位置检测装置的检测结果,检测所述活塞上死点与原点之间的上死点侧振幅和下死点与原点之间的下死点侧振幅;
电流指令装置(61,62),用来产生并向所述电源施加所述电流指令值,使所述位置检测装置所检测的位置与所述位置指令装置所指令的位置一致;
振幅控制装置(61,66),用来控制所述位置指令装置所用正弦函数的振幅和所述电流指令装置所产生的电流指令值的振幅之中的至少一个,使所述振幅检测装置所检测的上死点侧振幅与下死点侧振幅之中大者与预定的目标值一致。
14.一种其活塞由线性发动机驱动在气缸内往复运动产生压缩气体的线性压缩机的驱动设备,其特征在于包括:
电源(3),用来按照电流指令值向所述线性发动机输出驱动电流;
电流指令装置(62,73),用来按正弦函数产生并向所述电源施加所述电流指令值;
位置检测装置(4,63),用来检测所述气缸内所述活塞的位置;
振幅检测装置(64),用来根据位置检测装置的检测结果,检测所述活塞上死点与原点之间的上死点侧振幅和下死点与原点之间的下死点侧振幅;以及
振幅控制装置(66),用来控制所述电流指令装置所用正弦函数的振幅,使所述振幅检测装置所检测的上死点侧振幅与下死点侧振幅之中的大者与预定的目标值一致。
15.一种其活塞由线性发动机驱动在气缸内往复运动产生压缩气体的线性压缩机的驱动设备,其特征在于包括:
电源(3),用来按照电流指令值向所述线性发动机输出驱动电流;
位置指令装置(60),用来按正弦函数发出所述气缸内所述活塞位置的指令;
位置检测装置(4,63),用来检测所述气缸内所述活塞的位置;
电流指令装置(61,62),用来产生并向所述电源施加所述电流指令值,使所述位置检测装置所检测的位置与所述位置指令装置所指令的位置一致;
偏移量检测装置(64),用来根据所述位置检测装置的检测结果检测所述活塞中性点离开原点的偏移量;
偏移量控制装置(67),用来控制所述位置指令装置所用的正弦函数的偏移量,以消除所述偏移量检测装置所检测的偏移量。
16.按照权利要求15的线性压缩机的驱动设备,其特征在于还包括:
振幅检测装置(64),用来根据位置检测装置的检测结果,检测所述活塞上死点与原点之间的上死点侧振幅和所述活塞的下死点与原点之间的下死点侧振幅;以及
振幅控制装置(66),用来控制用于所述位置指令装置的正弦函数的振幅和所述电流指令装置所产生的电流指令值的振幅之中的至少一个,使所述振幅检测装置所检测的上死点侧振幅与下死点侧振幅之中的大者与预定的目标值一致。
17.一种其活塞由线性发动机驱动在气缸内往复运动产生压缩气体的线性压缩机的驱动设备,其特征在于包括:
电源(3),用来按照电流指令值向所述线性发动机输出驱动电流;
电流指令装置(62,73),用来按正弦函数产生并向所述电源施加所述电流指令值;
位置检测装置(4,63),用来检测所述气缸内所述活塞的位置;
振幅检测装置(64),用来根据所述位置检测装置的检测结果,检测所述活塞的振幅;
偏移量检测装置(64),用来根据所述位置检测装置的检测结果,检测所述活塞中性点离开原点的偏移量;
振幅控制装置(66),用来控制用于所述电流指令装置的正弦函数的振幅,使所述振幅检测装置所检测的振幅与预定的目标值一致;以及
偏移量控制装置(67),用来控制所述电流指令装置所用的正弦函数的偏移量,以消除所述偏移量检测装置所检测的偏移量。
18.按照权利要求17的线性压缩机的驱动设备,其特征在于:
所述振幅检测装置(64)根据所述位置检测装置的检测结果检测所述活塞上死点与原点之间的上死点侧振幅和所述活塞的下死点与原点之间的下死点侧振幅;以及
所述振幅控制装置(66)控制用于所述电流指令装置的正弦函数的振幅,使所述振幅检测装置所检测的上死点侧振幅与下死点侧振幅之中的大者与预定的目标值一致。
19.一种其活塞由线性发动机驱动在气缸内往复运动和通过开启/关闭排气阀和进气阀产生压缩气体的线性压缩机的驱动设备,其特征在于包括:
电源(101,102),用来驱动所述线性发动机;
检测装置(104,107),用来检测所述排气阀的开启周期;
电流控制装置(108,109),用来根据所述检测装置的检测结果,在一段预定的时间切断从所述电源到所述线性发动机的电流。
20.按照权利要求19的线性压缩机的驱动设备,其特征在于:
所述电源的输出电流是可以驱动的;
所述检测装置包括:
位置检测装置(104),用来检测所述气缸内所述活塞的位置;
确定装置(107),用来根据所述位置检测装置的检测结果,确定所述排气阀的开启周期;
线性压缩机的所述驱动设备还包括:
电流检测装置(103),用来检测所述电源的输出电流;以及
电流指令装置(106),用来根据所述位置检测装置的检测结果,发出所述电源输出电流的指令;其中
所述电流控制装置将所述电源的输出电流切断一段预定的时间,并控制所述电源的输出电流,使得在其他时间、所述电流检测装置所检测的电流与所述电流指令装置根据所述确定装置的确定结果所指令的电流一致。
21.按照权利要求19的线性压缩机的驱动设备,其特征在于:
所述电源的输出电流是可控的;
所述检测装置包括:
位置检测装置(123),用来检测所述气缸内所述活塞的位置;以及
确定装置(127),用来根据所述位置检测装置的检测结果,确定所述排气阀的开启周期;
线性压缩机的所述驱动设备还包括:
电流检测装置(103),用来检测所述电源的输出电流;以及
电压控制装置(125,126),用来根据所述位置检测装置的检测结果,控制所述电源输出电压;以及
开关装置(122),它设置在所述电源与所述线性发动机之间;其中
所述电流控制装置(128)在一段预定的时间内使所述开关装置变成非导电的,并根据所述确定装置的确定结果在其他时间内使所述开关装置变成导电的。
22.按照权利要求19的线性压缩机的驱动设备,其特征在于:
所述预定的一段时间是所述排气阀的开启周期。
Applications Claiming Priority (12)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP10004796A JP3177443B2 (ja) | 1996-04-22 | 1996-04-22 | リニアコンプレッサの駆動装置 |
| JP100047/96 | 1996-04-22 | ||
| JP08108908A JP3118413B2 (ja) | 1996-04-30 | 1996-04-30 | リニアコンプレッサの駆動装置 |
| JP108908/96 | 1996-04-30 | ||
| JP17949396A JP3177448B2 (ja) | 1996-07-09 | 1996-07-09 | リニアコンプレッサの駆動装置 |
| JP179493/96 | 1996-07-09 | ||
| JP268446/96 | 1996-10-09 | ||
| JP26844696A JP3177457B2 (ja) | 1996-10-09 | 1996-10-09 | リニアコンプレッサの駆動装置 |
| JP27594196A JP3177460B2 (ja) | 1996-10-18 | 1996-10-18 | リニアコンプレッサの駆動装置 |
| JP275940/96 | 1996-10-18 | ||
| JP27594096A JP3177459B2 (ja) | 1996-10-18 | 1996-10-18 | リニアコンプレッサの駆動装置 |
| JP275941/96 | 1996-10-18 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN1168965A true CN1168965A (zh) | 1997-12-31 |
Family
ID=27552093
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN97109762A Pending CN1168965A (zh) | 1996-04-22 | 1997-04-22 | 线性压缩机的驱动设备 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US5980211A (zh) |
| KR (1) | KR100449128B1 (zh) |
| CN (1) | CN1168965A (zh) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1313733C (zh) * | 2000-11-29 | 2007-05-02 | Lg电子株式会社 | 用于控制线性压缩机操作的装置和方法 |
| CN1325797C (zh) * | 2000-11-29 | 2007-07-11 | Lg电子株式会社 | 用于控制线性压缩机的操作的装置和方法 |
| CN100359175C (zh) * | 1999-11-30 | 2008-01-02 | 松下电器产业株式会社 | 直线压缩机驱动装置、媒体和信息组件 |
| CN1930764B (zh) * | 2004-03-05 | 2010-05-05 | Bsh博世和西门子家用器具有限公司 | 用于调节可逆线性驱动单元中的电枢行程的设备 |
| CN101835980B (zh) * | 2007-10-24 | 2012-07-04 | Lg电子株式会社 | 往复式压缩机 |
| CN104728074A (zh) * | 2013-12-19 | 2015-06-24 | Lg电子株式会社 | 线性压缩机控制装置及控制方法 |
| CN106605061A (zh) * | 2014-08-25 | 2017-04-26 | Lg电子株式会社 | 线性压缩机以及用于控制线性压缩机的装置和方法 |
Families Citing this family (70)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6121736A (en) * | 1998-07-10 | 2000-09-19 | Matsushita Electric Industrial Co., Ltd. | Control apparatus for motor, and motor unit having the control apparatus |
| DE19952578B4 (de) * | 1998-11-04 | 2005-11-24 | Lg Electronics Inc. | Vorrichtung und Verfahren zum Steuern eines Linearverdichters |
| US6129527A (en) * | 1999-04-16 | 2000-10-10 | Litton Systems, Inc. | Electrically operated linear motor with integrated flexure spring and circuit for use in reciprocating compressor |
| ATE363763T1 (de) * | 1999-06-21 | 2007-06-15 | Fisher & Paykel Appliances Ltd | Linearmotor |
| US6264432B1 (en) * | 1999-09-01 | 2001-07-24 | Liquid Metronics Incorporated | Method and apparatus for controlling a pump |
| KR100317301B1 (ko) * | 2000-01-21 | 2001-12-22 | 구자홍 | 선형 압축기의 피스톤 위치 제어장치 및 방법 |
| DE10033992A1 (de) * | 2000-07-12 | 2002-01-31 | Grundfos As | Fördervorrichtung mit einem stromgesteuerten Motor |
| US6520746B2 (en) * | 2000-09-27 | 2003-02-18 | Lg Electronics Inc. | Apparatus and method for controlling operation of reciprocating compressor |
| KR100378815B1 (ko) * | 2000-11-28 | 2003-04-07 | 엘지전자 주식회사 | 리니어 컴프레샤의 스트로크 떨림 검출장치 및 방법 |
| CN1247896C (zh) * | 2000-11-29 | 2006-03-29 | Lg电子株式会社 | 控制线性压缩机的设备和方法 |
| KR100367605B1 (ko) * | 2000-11-29 | 2003-01-14 | 엘지전자 주식회사 | 패턴인식을 이용한 리니어 컴프레샤의 운전제어장치 |
| KR100397556B1 (ko) * | 2001-03-23 | 2003-09-17 | 주식회사 엘지이아이 | 왕복동식 압축기 |
| JP2002285958A (ja) * | 2001-03-28 | 2002-10-03 | Matsushita Refrig Co Ltd | リニアコンプレッサの制御装置 |
| US6494685B2 (en) * | 2001-03-29 | 2002-12-17 | Kadant, Inc. | Pump and motor assembly with constant pressure output |
| US6623246B2 (en) * | 2001-04-13 | 2003-09-23 | Lg Electronics Inc. | Apparatus and method for controlling operation of linear motor compressor |
| JP3511018B2 (ja) * | 2001-05-18 | 2004-03-29 | 松下電器産業株式会社 | リニアコンプレッサ駆動装置 |
| KR100408068B1 (ko) * | 2001-07-31 | 2003-12-03 | 엘지전자 주식회사 | 왕복동식 압축기의 스트로크 제어장치 및 방법 |
| US6685438B2 (en) * | 2001-08-01 | 2004-02-03 | Lg Electronics Inc. | Apparatus and method for controlling operation of reciprocating compressor |
| US6682310B2 (en) * | 2001-08-01 | 2004-01-27 | Lg Electronics Inc. | Apparatus and method for controlling operation of reciprocating motor compressor |
| KR100411786B1 (ko) * | 2001-09-03 | 2003-12-24 | 삼성전자주식회사 | 리니어 압축기의 제어장치 및 제어방법 |
| NZ515578A (en) * | 2001-11-20 | 2004-03-26 | Fisher & Paykel Appliances Ltd | Reduction of power to free piston linear motor to reduce piston overshoot |
| US6595757B2 (en) * | 2001-11-27 | 2003-07-22 | Kuei-Hsien Shen | Air compressor control system |
| JP2003220363A (ja) * | 2002-01-29 | 2003-08-05 | Citizen Electronics Co Ltd | 軸方向駆動の振動体 |
| KR100471719B1 (ko) * | 2002-02-28 | 2005-03-08 | 삼성전자주식회사 | 리니어 압축기의 제어방법 |
| KR20030079784A (ko) * | 2002-04-04 | 2003-10-10 | 마츠시타 덴끼 산교 가부시키가이샤 | 냉동 사이클 장치와, 그것을 구비하는 공기 조화기,냉장고, 온수 공급기 및 극저온 냉동 장치 |
| US20040028550A1 (en) * | 2002-04-10 | 2004-02-12 | Thomas Robert Malcolm | Air purification with ozone |
| US6885116B2 (en) * | 2002-05-06 | 2005-04-26 | Jeffrey G. Knirck | Moving coil linear motor positioning stage with a concentric aperture |
| BR0300010B1 (pt) * | 2003-01-08 | 2012-05-02 | sistema de controle de um compressor linear, método de controle de um compressor linear, compressor linear e sistema de refrigeração. | |
| DE10314007A1 (de) * | 2003-03-28 | 2004-10-07 | Leybold Vakuum Gmbh | Steuerung einer Kolbenvakuumpumpe |
| KR100941422B1 (ko) * | 2003-08-04 | 2010-02-10 | 삼성전자주식회사 | 리니어 압축기 및 그 제어 장치 |
| NZ527999A (en) * | 2003-09-02 | 2005-08-26 | Fisher & Paykel Appliances Ltd | Controller improvements |
| BRPI0318601B1 (pt) * | 2003-11-11 | 2017-04-04 | Lg Electronics Inc | aparelho e método de controle de acionamento de compressor linear |
| BRPI0400108B1 (pt) * | 2004-01-22 | 2017-03-28 | Empresa Brasileira De Compressores S A - Embraco | compressor linear e método de controle de um compressor linear |
| KR100533041B1 (ko) * | 2004-02-20 | 2005-12-05 | 엘지전자 주식회사 | 왕복동식 압축기의 운전제어장치 및 방법 |
| DE102004010403A1 (de) * | 2004-03-03 | 2005-09-22 | BSH Bosch und Siemens Hausgeräte GmbH | Reversierender Linearantrieb mit Mitteln zur Erfassung einer Ankerposition |
| US7032400B2 (en) | 2004-03-29 | 2006-04-25 | Hussmann Corporation | Refrigeration unit having a linear compressor |
| US9243620B2 (en) * | 2004-08-30 | 2016-01-26 | Lg Electronics Inc. | Apparatus for controlling a linear compressor |
| WO2006025618A2 (en) * | 2004-08-30 | 2006-03-09 | Lg Electronics, Inc. | Linear compressor controlling apparatus and its controlling method |
| US7760442B2 (en) * | 2004-11-01 | 2010-07-20 | Mitsubishi Electric Corporation | Voice coil motor control device and method of driving the same, image pickup device |
| US7213405B2 (en) * | 2005-05-10 | 2007-05-08 | Hussmann Corporation | Two-stage linear compressor |
| US7478539B2 (en) * | 2005-06-24 | 2009-01-20 | Hussmann Corporation | Two-stage linear compressor |
| US7628027B2 (en) * | 2005-07-19 | 2009-12-08 | Hussmann Corporation | Refrigeration system with mechanical subcooling |
| KR100690690B1 (ko) * | 2005-11-01 | 2007-03-09 | 엘지전자 주식회사 | 왕복동식 압축기의 운전 제어 장치 및 그 방법 |
| KR100774470B1 (ko) * | 2006-01-16 | 2007-11-08 | 엘지전자 주식회사 | 왕복동식 압축기의 운전제어장치 및 방법 |
| US8079825B2 (en) * | 2006-02-21 | 2011-12-20 | International Rectifier Corporation | Sensor-less control method for linear compressors |
| DE102006009256A1 (de) * | 2006-02-28 | 2007-08-30 | BSH Bosch und Siemens Hausgeräte GmbH | Linearantrieb und Linearverdichter mit anpassbarer Leistung |
| DE102006009259A1 (de) | 2006-02-28 | 2007-08-30 | BSH Bosch und Siemens Hausgeräte GmbH | Verfahren zum prädiktiven Regeln eines Linearantriebs bzw. eines Linearverdichters sowie prädiktiv geregelter Linearantrieb bzw. Linearverdichter |
| KR100870541B1 (ko) * | 2007-03-30 | 2008-11-26 | 엘지전자 주식회사 | 냉장고 및 그 제어방법 |
| JP5091535B2 (ja) * | 2007-04-26 | 2012-12-05 | 三洋電機株式会社 | モータ制御装置 |
| BRPI0902557B1 (pt) | 2009-07-08 | 2020-03-10 | Embraco Indústria De Compressores E Soluções E Refrigeração Ltda. | Compressor linear |
| DE102009038308A1 (de) * | 2009-08-21 | 2011-02-24 | Siemens Aktiengesellschaft | Verfahren zum Betrieb einer Kälteerzeugungseinrichtung zur Kühlung eines Supraleiters sowie hierfür geeignete Kälteerzeugungseinrichtung |
| US9217429B2 (en) | 2009-11-18 | 2015-12-22 | Lg Electronics Inc. | Linear compressor |
| KR101665695B1 (ko) * | 2009-11-18 | 2016-10-13 | 엘지전자 주식회사 | 리니어 압축기 |
| BRPI1101094A2 (pt) | 2011-03-15 | 2013-06-11 | Whirlpool Sa | sistema de acionamento para compressor linear ressonante, mÉtodo de acionamento para compressor linear ressoante e compressor linear ressonante |
| CN102392813B (zh) * | 2011-06-10 | 2015-10-14 | 辽宁华兴森威科技发展有限公司 | 压缩机组转速调节控制系统 |
| BRPI1103355A2 (pt) * | 2011-07-04 | 2013-07-23 | Whirlpool Sa | dispositivo adaptador para compressor linear, e compressor provido do referido dispositivo |
| BRPI1103314A2 (pt) * | 2011-07-21 | 2013-08-06 | Whirlpool Sa | compressor linear |
| BRPI1103776B1 (pt) | 2011-08-19 | 2018-12-04 | Whirlpool Sa | sistema e método de controle de curso e operação em frequência de ressonância de um motor linear rossonante |
| US8723462B2 (en) * | 2012-06-15 | 2014-05-13 | GM Global Technology Operations LLC | Methods, systems and apparatus for estimating angular position and/or angular velocity of a rotor of an electric machine |
| US8937411B2 (en) * | 2012-09-06 | 2015-01-20 | Samsung Electro-Mechanics Co., Ltd. | Vibration generating device |
| US10208741B2 (en) | 2015-01-28 | 2019-02-19 | Haier Us Appliance Solutions, Inc. | Method for operating a linear compressor |
| US10502201B2 (en) | 2015-01-28 | 2019-12-10 | Haier Us Appliance Solutions, Inc. | Method for operating a linear compressor |
| BR102015016317B1 (pt) * | 2015-07-07 | 2022-07-19 | Embraco Indústria De Compressores E Soluções Em Refrigeração Ltda | Método e sistema de proteção de um compressor linear ressonante |
| US10174753B2 (en) * | 2015-11-04 | 2019-01-08 | Haier Us Appliance Solutions, Inc. | Method for operating a linear compressor |
| WO2017203858A1 (ja) * | 2016-05-27 | 2017-11-30 | 株式会社日立製作所 | リニアモータシステム及び圧縮機 |
| JP6749205B2 (ja) * | 2016-10-13 | 2020-09-02 | 日立グローバルライフソリューションズ株式会社 | リニアモータ制御装置及びこれを搭載した圧縮機 |
| US10830230B2 (en) | 2017-01-04 | 2020-11-10 | Haier Us Appliance Solutions, Inc. | Method for operating a linear compressor |
| KR102237724B1 (ko) * | 2017-03-27 | 2021-04-08 | 엘지전자 주식회사 | 리니어 압축기 및 리니어 압축기의 제어 방법 |
| US10641263B2 (en) | 2017-08-31 | 2020-05-05 | Haier Us Appliance Solutions, Inc. | Method for operating a linear compressor |
| US10670008B2 (en) | 2017-08-31 | 2020-06-02 | Haier Us Appliance Solutions, Inc. | Method for detecting head crashing in a linear compressor |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3937600A (en) * | 1974-05-08 | 1976-02-10 | Mechanical Technology Incorporated | Controlled stroke electrodynamic linear compressor |
| US3980964A (en) * | 1974-05-20 | 1976-09-14 | Grodinsky Robert M | Noise reduction circuit |
| US3947155A (en) * | 1974-09-19 | 1976-03-30 | Tecumseh Products Company | Linear compressor |
| JPS5284507A (en) * | 1975-12-30 | 1977-07-14 | Mekanikaru Tekunorojii Inc | Linear compressors |
| US4291258A (en) * | 1980-06-17 | 1981-09-22 | Mechanical Technology Incorporated | DC Excitation control for linear oscillating motors |
| US4353220A (en) * | 1980-06-17 | 1982-10-12 | Mechanical Technology Incorporated | Resonant piston compressor having improved stroke control for load-following electric heat pumps and the like |
| US4490691A (en) * | 1980-06-30 | 1984-12-25 | Dolby Ray Milton | Compressor-expander circuits and, circuit arrangements for modifying dynamic range, for suppressing mid-frequency modulation effects and for reducing media overload |
| US4498055A (en) * | 1981-09-10 | 1985-02-05 | Dolby Ray Milton | Circuit arrangements for modifying dynamic range |
| US4498060A (en) * | 1981-12-01 | 1985-02-05 | Dolby Ray Milton | Circuit arrangements for modifying dynamic range using series arranged bi-linear circuits |
| US4736433A (en) * | 1985-06-17 | 1988-04-05 | Dolby Ray Milton | Circuit arrangements for modifying dynamic range using action substitution and superposition techniques |
| US4750871A (en) * | 1987-03-10 | 1988-06-14 | Mechanical Technology Incorporated | Stabilizing means for free piston-type linear resonant reciprocating machines |
| JPH02154950A (ja) * | 1988-12-08 | 1990-06-14 | Fujitsu Ltd | スターリング冷凍機 |
| US5535593A (en) * | 1994-08-22 | 1996-07-16 | Hughes Electronics | Apparatus and method for temperature control of a cryocooler by adjusting the compressor piston stroke amplitude |
-
1997
- 1997-04-18 US US08/840,463 patent/US5980211A/en not_active Expired - Fee Related
- 1997-04-21 KR KR1019970014796A patent/KR100449128B1/ko not_active IP Right Cessation
- 1997-04-22 CN CN97109762A patent/CN1168965A/zh active Pending
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100359175C (zh) * | 1999-11-30 | 2008-01-02 | 松下电器产业株式会社 | 直线压缩机驱动装置、媒体和信息组件 |
| CN1313733C (zh) * | 2000-11-29 | 2007-05-02 | Lg电子株式会社 | 用于控制线性压缩机操作的装置和方法 |
| CN1325797C (zh) * | 2000-11-29 | 2007-07-11 | Lg电子株式会社 | 用于控制线性压缩机的操作的装置和方法 |
| CN1930764B (zh) * | 2004-03-05 | 2010-05-05 | Bsh博世和西门子家用器具有限公司 | 用于调节可逆线性驱动单元中的电枢行程的设备 |
| CN101835980B (zh) * | 2007-10-24 | 2012-07-04 | Lg电子株式会社 | 往复式压缩机 |
| CN104728074A (zh) * | 2013-12-19 | 2015-06-24 | Lg电子株式会社 | 线性压缩机控制装置及控制方法 |
| CN104728074B (zh) * | 2013-12-19 | 2017-04-12 | Lg电子株式会社 | 线性压缩机控制装置及控制方法 |
| US9850890B2 (en) | 2013-12-19 | 2017-12-26 | Lg Electronics Inc. | Device and method for controlling linear compressor |
| CN106605061A (zh) * | 2014-08-25 | 2017-04-26 | Lg电子株式会社 | 线性压缩机以及用于控制线性压缩机的装置和方法 |
| CN106605061B (zh) * | 2014-08-25 | 2019-12-27 | Lg电子株式会社 | 线性压缩机以及用于控制线性压缩机的装置和方法 |
| US10598175B2 (en) | 2014-08-25 | 2020-03-24 | Lg Electronics Inc. | Linear compressor, and apparatus and method for controlling a linear compressor |
Also Published As
| Publication number | Publication date |
|---|---|
| KR100449128B1 (ko) | 2004-12-03 |
| KR970070561A (ko) | 1997-11-07 |
| US5980211A (en) | 1999-11-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1168965A (zh) | 线性压缩机的驱动设备 | |
| CN1128293C (zh) | 振动型压缩机 | |
| CN1083939C (zh) | 线性压缩机 | |
| CN1248073C (zh) | 电动机位置控制装置 | |
| CN1261689C (zh) | 控制线性压缩机的方法 | |
| CN1516918A (zh) | 同步电抗电动机的控制装置 | |
| CN1278483C (zh) | 电动机控制装置 | |
| CN1066831C (zh) | 控制器和自适应修改参数的方法 | |
| CN1302610C (zh) | Dc-dc变换器 | |
| CN1241320C (zh) | 无刷电动机的控制方法以及控制装置 | |
| CN1287976C (zh) | 压力机 | |
| CN1134885C (zh) | 高频换流器及应用该高频换流器的感应加热烹调器 | |
| CN1063381A (zh) | 电压或无功控制方法及其控制设备 | |
| CN1545758A (zh) | 直线振动电机的控制系统 | |
| CN1263377A (zh) | 电源装置及使用了该电源的空调机 | |
| CN1477767A (zh) | 电动机驱动控制装置 | |
| CN1671964A (zh) | 压缩机的驱动装置及冷冻装置 | |
| CN1482727A (zh) | 直流—直流变换器 | |
| CN1750376A (zh) | 开关电源电路 | |
| CN1704718A (zh) | 表面仿形测定装置、表面仿形测定方法及表面仿形测定程序 | |
| CN1543057A (zh) | 驱动电动机的逆变控制器和使用逆变控制器的空气调节机 | |
| CN1858981A (zh) | 电源调整电路及半导体器件 | |
| CN1794893A (zh) | 放电灯点灯装置以及照明系统 | |
| CN1961475A (zh) | 交流电机的减速方法以及逆变器装置 | |
| CN1961612A (zh) | 高频加热装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |