-
Die
vorliegende Erfindung bezieht sich im Allgemeinen auf Antennenkommunikationssysteme
und im Besonderen auf ein Antennensystem mit Fernsteuerung der Antennenneigung.
-
Herkömmliche
Kommunikationssysteme für
Mobilfunk- und persönliche
Kommunikationssysteme (PCSs) nutzen untereinander verbundene Kommunikationsnetze,
damit die Netzteilnehmer miteinander kommunizieren können. PCS-Netze
weisen eine Anzahl von Funkvermittlungsstellen ("MSCs" für "Mobile Switching
Centers") auf, die
die Netzeilnehmer (MSCs) mit privaten Selbstwähl-Telefonnetzen ("PSTNs" für "Private Switched
Telephone Networks")
(PSTNs) und anderen MSCs verbinden. Die MSCs sind verbunden mit
und steuern eine Anzahl von Basisstationen. Die Basisstationen befinden
sich in den Zellen des Netzes, um die Netzversorgung in dem Bereich
bereitzustellen, der in der näheren
Umgebung der Basisstation liegt. Die Basisstationen sind mit Antennen
ausgerüstet,
die die Kommunikation zwischen der Basisstation und den Mobilfunkteilnehmern
oder PCS-Teilnehmern innerhalb der Zelle ermöglichen, in der die Basisstation
ihren Standort hat. Die Basisstationen kommunizieren mit den MSCs,
damit die PCS-Teilnehmer
mit anderen PCS-Teilnehmern und PSTN-Teilnehmern kommunizieren können.
-
Die
Optimierung der von den Basisstationen bereitgestellten Netzversorgung
für die
PCS-Teilnehmer stellt aufgrund der großen Anzahl von Parametern,
die für
einen erfolgreichen Netzbetrieb benötigt werden, eine sehr große Herausforderung
dar. Die Positionierung der Basisstationen und ihrer dazugehörigen Antennen
ist wichtig zur Überwindung
von Problemen wie Kanalinterferenz, verursacht durch Überlastung
von benachbarten Basisstationen, zusätzlich zu anderen Faktoren
wie der Topologie, welche die Basisstation umgibt. Ein Verfahren,
das zur Verringerung von Interferenz mit anderen Basisstationen
in der Nähe
angewendet wird, ist der Einsatz von abwärts geneigten Antennen. Abwärts geneigte
Antennen helfen, das Problem der Überlappung von Zellenstandorten
zu verringern, indem der vertikale Winkel der von der Antenne gesendeten Strahlung
im Verhältnis
zu dem von der Antenne versorgten Umgebungsbereich eingestellt wird.
Indem die Antenne mit einer Abwärtsneigung
positioniert wird, kann der Bereich, in den die Strahlung von der
Antenne gestreut wird, verkleinert und damit die Interferenz mit
anderen Basisstationen verringert werden. Die Antennen müssen jedoch
sorgfältig
positioniert werden, um die benötigte
Funkversorgung bereitzustellen, während gleichzeitig eine Interferenz
mit anderen Zellen oder Mikrozellen innerhalb des Netzes und benachbarten
konkurrierenden Netzen vermieden werden muss. Leider können sich
an den Basisstationen die Bedingungen, die sich auf die Funkversorgung
auswirken, im Lauf der Zeit ändern,
so dass ein Nachjustieren der Antennenposition oder der Abwärtsneigung
erforderlich ist. Infolgedessen muss die Positionierung der Antennen
regelmäßig nachjustiert
werden.
-
Zum
Beispiel können
jahreszeitliche Wetter- und Temperaturschwankungen die mit den Antennen
verbundenen Strahlungsdiagramme verändern. Eine Veränderung
der Topologie aufgrund des Hinzufügens neuer Basisstationen,
Gebäude
usw. kann sich ebenfalls auf Interferenz, Strahlungsdiagramme und
Funkversorgung im Zusammenhang mit den Basisstationen auswirken.
Infolgedessen entsteht die Notwendigkeit, die Positionierung oder
die Neigung der Antennen nachzujustieren.
-
Lösungen der
ersten Generation verwendeten für
die Einstellung der Abwärtsneigung
der Antenne eine mechanische Vorrichtung. Diese Lösung erfordert
jedoch, dass jedes Mal, wenn die Nachjustierung erforderlich war
oder die Antenne mit einem neuen Neigungswinkel versehen werden
muss, ein Techniker anreisen, auf den Turm steigen und jede Antenne
physisch justieren muss. Dies ist insbesondere beim Einstellen eines neuen
Systems teuer und zeitaufwändig,
da normalerweise mehrere Nachjustierungen erforderlich sind, um die
notwendige Systemoptimierung zu erzielen.
-
Lösungen der
zweiten Generation sehen Antennen mit elektrischer Einstellung der
Abwärtsneigung vor.
Während
es diese Lösung
für den
Techniker einfacher gemacht hat, die Antennen zu positionieren,
erfordern Systeme der zweiten Generation immer noch, dass ein Techniker
an den Standort reist und der Turm jedes Mal, wenn eine Antenne
eine Nachjustierung erfordert, von einem Techniker bestiegen werden
muss. Infolgedessen bleibt selbst bei einer elektrischen Positionierung
der Antennen das Problem der benötigten
Ausfallzeit des Systems für
Justierungen und der mit der Entsendung eines Technikers an den
Standort verbundenen Kosten bestehen.
-
Das
Dokument Wo-A-96/14670 offenbart ein Antennensteuerungssystem, welches
Antriebsvorrichtungen zum Einstellen von Phasenschiebern zur Veränderung
der Antennenkeulenneigung umfasst. Ein einziges Steuergerät ist mit
einer oder einer Vielzahl von Antennensensoren und Antennenantriebsvorrichtungen verbunden.
Dieses Antennensteuergerät
kann mit einem zentralen Steuergerät über eine Telefon- oder Funkverbindung
verbunden werden. Das zentrale Steuergerät kann ein Personal Computer
sein.
-
ZUSAMMENFASSUNG
DER ERFINDUNG
-
Es
ist daher ein Ziel der Erfindung, die von Antennen in Funkkommunikationsnetzen
bereitgestellte Funkversorgung zu verbessern.
-
Ein
anderes Ziel der Erfindung besteht darin, ein automatisiertes Antennensystem
bereitzustellen, das automatisch von einem entfernten Ort aus justiert
werden kann.
-
Ein
weiteres Ziel der vorliegenden Erfindung besteht darin, ein Antennensystem
bereitzustellen, das dynamisch in Echtzeit justiert werden kann,
um auf sich ändernde
Bedingungen zu reagieren.
-
Noch
ein weiteres Ziel der Erfindung besteht darin, ein Antennensystem
bereitzustellen, welches die Antennenposition überprüfen und Antennenelemente testen
kann, um einen ordnungsgemäßen Betrieb
sicherzustellen und alle mit der Antennenposition und dem Betrieb
verbundenen Fehler zu erkennen.
-
Ein
Ziel besteht auch darin, die mit der Optimierung und Wartung eines
Netzes von Kommunikationsantennen verbundenen Kosten zu senken.
-
Die
oben genannten Ziele werden durch die Implementierung eines Steuerungssystems
erreicht, wie es in Anspruch 1 dargestellt ist, und durch die Verfahren,
die in den Ansprüchen
24 und 28 dargestellt sind.
-
Nach
einer beispielhaften Ausführungsform
der vorliegenden Erfindung werden die vorstehenden und weitere Ziele
durch die Implementierung eines Antennensystems mit ferngesteuerter
Einstellung der Abwärtsneigung
erreicht. Gemäß der Erfindung
wird ein Antennensteuerungssystem mit einer Antenne verbunden, um die
Position der Antenne zu steuern. Das System umfasst einen mit der
Antenne verbundenen Motor zum Justieren der Position oder des Neigungswinkels
der Antenne. Für
den Betrieb des Motors wird ein Antrieb vorgesehen. Außerdem wird
ein Sensor zur Erkennung der Position der Antenne vorgesehen. Zusätzlich ist
ein Antennensteuergerät
mit einem Antennenspeicher, dem Antrieb und dem Sensor verbunden,
um die erkannte Position der Antenne zu lesen und um den Antrieb
so zu steuern, dass er die Antennenposition justiert. Ein Hauptsteuergerät ist mit
dem Antennensteuergerät
verbunden, um Befehle an das Antennensteuergerät zu senden und Daten von ihm
zu lesen, zum Beispiel die Antennenposition. Auf diese Weise kann
das Hauptsteuergerät
eine Schnittstellenverbindung zu einer beliebigen Anzahl von Antennen
an einer Basisstation herstellen und die Position jeder einzelnen
Antenne steuern.
-
Nach
einer beispielhaften Ausführungsform
des Steuerungssystems ist auch eine Benutzerschnittstelle vorgesehen,
um Befehle an das Hauptsteuergerät
einzugeben und Daten aus ihm zu lesen. Die Schnittstelle kann an
der Basisstation, am Turm oder an einem entfernten Ort zum Beispiel über ein
Modem bereitgestellt werden. Nach einer Ausführungsform der Erfindung kann
die Benutzerschnittstelle ein Laptop-Computer sein. Ein Benutzer
oder Techniker kann dann Befehle eingeben und die Positionen der
Antennen von einem entfernten Ort aus überwachen, um so eine Echtzeit-Justierung
der Antennenposition zu ermöglichen.
-
KURZBESCHREIBUNG DER ZEICHNUNGEN:
-
Die
vorstehenden und weitere Merkmale, Ziele und Vorteile der Erfindung
werden beim Lesen der nachfolgenden Beschreibung in Verbindung mit
den Zeichnungen besser verständlich
werden, auf denen:
-
1 ein
Antennensteuerungssystem nach einer beispielhaften Ausführungsform
der Erfindung darstellt;
-
2 ein
Blockdiagramm des Antennensteuergeräts nach einer beispielhaften
Ausführungsform
der Erfindung darstellt;
-
3 ein
Blockdiagramm des Hauptsteuergerätsystems
nach einer beispielhaften [Ausführungsform] der
Erfindung darstellt;
-
4 ein
Blockdiagramm eines Antennensteuerungssystems nach einer alternativen
Ausführungsform
der Erfindung darstellt;
-
5 ein
Block[diagramm] eines Antennensteuerungssystems nach einer alternativen
Ausführungsform
der Erfindung darstellt;
-
6 ein
Ablaufdiagramm ist, das die Implementierung der grafischen Benutzerschnittstelle
mit dem Hauptsteuergerät
nach einer beispielhaften Ausführungsform
der Erfindung darstellt;
-
7A und
B Ablaufdiagramme sind, die den Betrieb und die Steuerung der Antennen
nach einer beispielhaften Ausführungsform
der Erfindung darstellen; und
-
8A und
B Ablaufdiagramme sind, die den Betrieb und die Steuerung der Antennen
nach einer beispielhaften Ausführungsform
der Erfindung darstellen.
-
DETAILLIERTE BESCHREIBUNG
DER ERFINDUNG:
-
Die
verschiedenen Merkmale der Erfindung werden nun unter Bezugnahme
auf die Figuren beschrieben, auf denen gleiche Teile mit denselben
Bezugszeichen gekennzeichnet sind.
-
Überblick über das System
-
In
einem zellularen Kommunikationssystem ist ein von dem Netz versorgter
Bereich in eine oder mehrere Zellen unterteilt. Jede Zelle ist mit
einer oder mehreren Basisstationen ausgestattet, um die Funkversorgung
der Zelle zu gewährleisten
und mit den PCS-Teilnehmern in der Zelle zu kommunizieren. Die Basisstationen
kommunizieren mit einem zentralen Steuergerät, zum Beispiel mit einer Funkvermittlungsstelle
(MSC), das die Kommunikation zwischen der Basisstation und den Mobilfunkteilnehmern
koordiniert. Zusätzlich
dazu stellt die MSC die Verbindungen zu den PSTN-Netzen und zu anderen
MSCs bereit, die andere Netze bedienen.
-
Jede
Basisstation ist mit einer Anzahl von Antennen ausgestattet, die
Nachrichten zu mit der Basisstation kommunizierenden PCS-Teilnehmern
sendet und Nachrichten von ihnen empfängt. Typischerweise beträgt die Anzahl
der Antennen pro Turm 6 bis 9, obwohl ein Fachmann
erkennen wird, dass je nach Bedarf eine beliebige Anzahl von Antennen
eingesetzt werden kann, um eine optimale Funkversorgung an jedem
beliebigen Standort bereitzustellen. In konventionellen Netzen bereitgestellte
Antennen werden manuell, mechanisch oder elektronisch von einem
Techniker an der Basisstation entsprechend den abgelesenen Werten
positioniert, die von dem Techniker innerhalb der Zelle gemessen
wurden.
-
Unter
Bezugnahme auf 1 wird nun eine beispielhafte
Ausführungsform
der vorliegenden Erfindung beschrieben. Wie auf 1 zu
sehen ist, ist eine Anzahl von Antennen 10 vorgesehen.
Die Antennen 10 können
auf der Spitze eines Turms angebracht sein, der sich an der Basisstation
befindet. Als Alternative kann eine Basisstation eine Anzahl von
Türmen
steuern, von denen jeder mit seinen eigenen Antennen ausgerüstet ist.
Jeder Antenne 10 ist eine Motor-/Antriebs-Baugruppe 20 zum
Justieren der Position oder der Abwärtsneigung der Antenne zugeordnet.
Eine Anzahl von Steuergeräten 40 ist
mit jeder der Motor-/Antriebs-Baugruppen 20 verbunden.
Zusätzlich
dazu sind die Steuergeräte 40 auch
mit einem Sensor 30 verbunden, wodurch eine Rückkopplungsschleife
zur Erkennung der Position der Antennen 10 gebildet wird.
Ein Steuergerät 40 ist
mit dem Hauptsteuergerät 50 verbunden,
das am Fuß des
Turms zum Beispiel in der Anlagensteuerzentrale bereitgestellt wird.
Die übrigen
Steuergeräte
sind in Kaskade zusammengeschaltet, so dass sie ein einfaches Netzwerk
von Steuergeräten
bilden.
-
Jeder
Turm in der Basisstation enthält
eine Anzahl von Antennen, die genutzt werden, um die Kommunikation
zu den Mobilfunkgeräten
oder persönlichen
Kommunikationssystemen ("PCS") innerhalb der Zelle der
Basisstation bereitzustellen. In 1 sind fünf Antennen
vorgesehen; diese Zahl dient jedoch nur als Beispiel. Obwohl jedes
Antennensteuergerät 40 so
dargestellt ist, dass es einer einzelnen Antenne 10 zugeordnet ist,
könnte
ein Antennensteuergerät 40 darüber hinaus
eine Vielzahl von Antennen steuern.
-
Antennensteuergerät
-
Nach
einer beispielhafen Ausführungsform
der Erfindung ist Antenne 10 eine phasengesteuerte Gruppenantenne
mit abwärts
geneigten Antennenkeulen. Wie zuvor beschrieben, wird zur Verringerung
der Interferenz zwischen Basisstationen die vertikale Neigung der
Antenne so gesteuert, dass sie für
einen bestimmten Standort optimal ausgerichtet ist, wie dem Fachmann
bekannt ist. Obwohl die hier beschriebenen beispielhaften Ausführungsformen
unter Bezugnahme auf abwärts
geneigte Antennen gegeben werden, wird ein Fachmann zu würdigen wissen,
dass auch die Justierung der Position von anderen Antennen gemäß der Erfindung durchgeführt werden
könnte.
-
Bezugnehmend
auf 2 sind ein einzelnes Antennensteuergerät 40 und
die Antenne 10 dargestellt. Nach dieser beispielhaften
Ausführungsform
wird ein Schrittmotor 201 verwendet, um ein Räderwerk
von Phasenschiebern 12 über
die Getriebewelle 11 anzutreiben. Die Phasenschieber 12 werden
ihrerseits verwendet, um die von der Antenne 10 ausgesendete
Strahlung zu steuern, wie dem Fachmann bekannt ist. Nach dieser Ausführungsform
treibt ein Einchip-Schrittmotorantrieb 202 den Schrittmotor 11 an.
-
Das
Antennensteuergerät 40 umfasst
nach der in 2 dargestellten beispielhaften
Ausführungsform ein
Mikroprozessor-Steuergerät 401 und
den dazugehörigen
Speicher 402. Die elektronischen Einrichtungen, in denen
das Steuergerät 40 untergebracht
ist, können
vergossen oder gekapselt werden, um die Einrichtungen vor Umwelteinflüssen zu
schützen.
Zusätzlich
kann jedes der Steuergeräte 40 durch
einen Stromstoß-
und Blitzschutz (nicht dargestellt) geschützt werden, um die elektronischen
Einrichtungen vor statischen Entladungen und Stromstößen durch
Blitzeinschläge
in der Nähe
zu schützen,
die einen Strom auf den Signalleitungen induzieren und dadurch das
Antennensteuergerät 40 und
die mit ihm verbundenen Einrichtungen beschädigen könnten.
-
Nach
einer bevorzugten Ausführungsform
ist das Mikroprozessor-Steuergerät 401 ein
PIC16C84 Mikrochip. Ein dazugehöriger
EEPROM-Speicher 402 speichert eine Antennenadresse (Ant
Address) und die aktuelle Abwärtsneigungsposition
(Ant Location) der Antenne 10. Ein Fachmann wird zu würdigen wissen,
dass andere Speicher wie beispielsweise ein RAM ebenfalls verwendet
werden könnten,
ohne von der Erfindung abzuweichen. Ein Mikroprozessor-Steuergerät 401 sendet
Befehlssignale an den Schrittmotorantrieb 202, um den Schrittmotor 201 zu
veranlassen, dass er das Räderwerk
bewegt und dadurch das Strahlungsdiagramm der ihm zugeordneten Antenne 10 steuert.
Das Mikroprozessor-Steuergerät 401 empfängt über die
seriellen Kommunikationsleitungen 41 rundgesendete Mitteilungen.
Jedes Mikroprozessor-Steuergerät überwacht
die Kommunikationsleitungen 41 auf vom Hauptsteuergerät 50 rundgesendete
Nachrichten, die an die einzelnen Steuergeräte 40 gerichtet sind.
Zusätzlich
empfängt
das Mikroprozessor-Steuergerät 401 Antennenpositionensignale
von einem Positionssensor 30. Das Mikroprozessor-Steuergerät liest
die Zahnradposition vom Sensor 30 und zeichnet die aktuelle
Position im Speicher 402 auf.
-
Positionssensor
-
Der
Sensor 30 ist in der Nähe
der Phasenschieber 12 vorgesehen. Der Sensor 30 erkannt
die Position der Phasenschieber 12 und überträgt die Positionen an das Mikroprozessor-Steuergerät 401.
Das Mikroprozessor-Steuergerät 401 schreibt
die Positionsdaten der Antenne 10 in den Speicher 402.
Nach einer Ausführungsform
ist der Sensor 30 ein Inkrementalencoder-Sensor, der jeden
Schritt des Räderwerks
erkennt. Als Alternative kann ein Absolutencoder verwendet werden,
um die absolute Zahnradposition bezogen auf 360° zu messen.
-
Nach
einer Ausführungsform
der Erfindung kann ein optischer Sensor verwendet werden. Nach dieser beispielhaften
Ausführungsform,
die in 2 dargestellt ist, befindet sich ein optisches
Encoderrad 13 am Ende des Phasenräderwerks. Der optische Sensor 30 zählt schrittweise
jede Bewegung des Encoderrads 13 und überträgt seinen ermittelten Wert
an das Mikroprozessor-Steuergerät 401.
Als Alternative kann eine mechanische Bürste auf einem Verfolgungskontakt
zur Erkennung der Position der Zahnräder 12 verwendet werden.
Die Position des Verfolgungskontakts wird von dem Sensor 30 in
ein digitales Signal konvertiert und an das Mikroprozessor-Steuergerät 401 übertragen.
Ein Hall-Sensor mit elektromagnetischem Relais oder ein statischer
elektromagnetischer Sensor könnten
ebenfalls zur Erkennung der Position der Zahnräder 12 der Antennenposition
verwendet werden.
-
Indem
ein Sensor zur Bildung einer Rückkopplungsschleife
verwendet wird, kann die Position jeder Antenne erkannt und überprüft werden,
um sicherzustellen, dass der Motor die Antenne korrekt positioniert hat.
Der Sensor stellt auch eine Vorrichtung zur Erkennung von Fehlern
innerhalb des Systems bereit, indem unrichtige Einstellungen der
Antennen identifiziert werden.
-
Hauptsteuergerät des Turms
-
Unter
Bezugnahme auf die in 3 dargestellte beispielhafte
Ausführungsform
kann das Hauptsteuergerät 50 im
Geräteraum
am Fuß des
Turms in der Basisstation vorgesehen werden. Wie in der beispielhaften Ausführungsform
von 3 gezeigt, ist ein Mikroprozessor-Steuergerät 501 zur
Steuerung der Antennensteuergeräte 40 vorgesehen.
Nach einer bevorzugten Ausführungsform
wird das Mikroprozessor-Steuergerät 501 unter Verwendung
eines PIC16C84 Mikrochips implementiert. Das Mikroprozessor-Steuergerät 501 sendet
die Befehle an die Antennensteuergeräte 40 über eine
serielle Kommunikationsleitung 41. Nach einer bevorzugten Ausführungsform
der Erfindung ist die Kommunikationsleitung 41 ein Koaxialkabel,
das vom Hauptsteuergerät 50 den
Turm hinauf bis zum ersten Antennensteuergerät 40 geführt wird.
Die übrigen
Antennensteuergeräte werden
ebenfalls unter Verwendung eines Koaxialkabels in Kaskade geschaltet.
-
Das
Mikroprozessor-Steuergerät 501 überträgt an jedes
der Antennensteuergeräte 40 gerichtete
Befehle. Die Antennensteuergeräte 40 überwachen
die Kommunikationsleitung 41 auf Befehle. Wenn das Antennensteuergerät 40 einen
an es gerichteten Befehl empfängt,
liest das Steuergerät
den Befehl und führt
die entsprechende Funktion aus, wie weiter unten genauer erklärt wird.
Das Hauptsteuergerät 501 empfängt ebenfalls
Nachrichten von den Antennensteuergeräten 40 und speichert
die entsprechenden aus den Daten gelesenen Nachrichten in seinem
dazugehörigen
Speicher 502. Nach einer beispielhaften Ausführungsform
kann der Speicher 502 ein EEPROM-Speicher sein, obwohl
andere Speichertypen ebenfalls verwendet werden können.
-
Nach
einer in 4 dargestellten alternativen
Ausführungsform
kann ein paralleler Kommunikationsbus 43 genutzt werden,
um das Hauptsteuergerät
mit den Antennensteuergeräten 40 zu
verbinden, wobei einzelne Verbindungen zu jedem Steuergerät verwendet
werden. Eine solche Konfiguration würde jedoch zusätzlich zu
dem größeren Overhead
in Verbindung mit der Kommunikation zwischen Steuergeräten auch
höhere Kosten
bei den Geräten
nach sich ziehen. Als Alternative könnte, wie in 5 gezeigt,
das Hauptsteuergerät 50 mit
den Antennensteuergeräten 40 kommunizieren,
indem von einem dazugehörigen
Sende-Empfangs-Gerät 55 rundgesendete
Hochfrequenz- (HF-) Nachrichten genutzt werden. Die HF-Nachrichten
würden von
einem zu jedem Antennensteuergerät 40 gehörenden Sende-Empfangs-Gerät 45 empfangen.
Dementsprechend könnte
jedes Antennensteuergerät 40 durch Übertragen
einer HF-Nachricht antworten, indem eine HF-Nachricht unter Nutzung
des zu ihm gehörenden
Sende-Empfangs-Gerätes 45 an
das zum Hauptsteuergerät 50 gehörende Sende-Empfangs-Gerät 55 übertragen
wird, wie dem Fachmann bekannt ist.
-
Die
Kommunikation zwischen dem Hauptsteuergerät 50 und den Antennensteuergeräten 40 kann nach
einer beispielhaften Ausführungsform
der Erfindung unter Verwendung eines einfachen Paketprotokolls implementiert
werden, das aus 8 Bit oder einem Byte besteht. Nach dieser beispielhaften
Ausführungsform enthält das obere
Halbbyte aus 4 Bit Befehle, die an das Antennensteuergerät gerichtet
sind, und das untere Halbbyte aus 4 Bit würde die Adresse des Steuergeräts enthalten.
Von den Antennensteuergeräten 40 gesendete
Befehle würden
Daten im oberen Halbbyte und die Adresse des Antennensteuergeräts 40 im
unteren Halbbyte enthalten.
-
Das
Hauptsteuergerät 50 umfasst
auch eine Schnittstelle 503, die die Kommunikation mit
einem Computer mit einer grafischen Benutzeroberfläche 504 ermöglicht,
der sich im Turm befindet, oder mit einem entfernten Computer 60 über eine
Modemschnittstelle 505. Nach einer bevorzugten Ausführungsform
ist die Schnittstelle 503 eine serielle RS232-Schnittstelle
eines Sende-Empfangs-Gerätes.
Zusätzlich
dazu kann auch ein Stromstoß-
oder Blitzschutz (nicht dargestellt) im Hauptsteuergerät 50 vorgesehen
werden.
-
Steuerung
der Antennenposition
-
Nun
wird die Steuerung der Antennenpositionen beschrieben. Wenn das
Hauptsteuergerät 50 die
Position der Antennen 10 bestimmen will, sendet das Hauptsteuergerät 50 einen
Befehl Antenna_Check über
die Kommunikationsleitung 41 an das gewünschte Steuergerät. Das Antennensteuergerät 40 überwacht
die Befehle auf der Kommunikationsleitung 41, indem es
die Pakete liest, die in dem seriellen Bitstrom rundgesendet werden.
Nach dem Lesen des Pakets stellt das Antennensteuergerät 40 fest,
ob die Paketadresse mit der Adresse des Steuergeräts Ant_Address übereinstimmt.
Wenn keine Übereinstimmung
vorliegt, setzt das Antennensteuergerät 40 die Überwachung
nach weiteren Befehlen fort. Wenn die Adresse übereinstimmt, liest das Antennensteuergerät 40 anschließend den
dazugehörigen
Befehl Antenna_Check und liest die Antennenneigung aus seinem dazugehörigen Speicher 402.
Das Antennensteuergerät 40 bündelt danach
die Antennenposition Ant_Location mit der Adresse des Antennensteuergeräts Ant Address
und sendet die Nachricht an das Hauptsteuergerät 50.
-
Damit
das Hauptsteuergerät 50 die
Antennenposition justieren kann, sendet das Hauptsteuergerät 50 einen
an das gewünschte
Antennensteuergerät 40 gerichteten
Befehl Change_Tilt über
die Kommunikationsleitung 41. Das Antennensteuergerät 40 überwacht
die Befehle auf der Kommunikationsleitung 41, indem es die
im seriellen Bitstrom rundgesendeten Pakete liest. Nach dem Lesen
des Pakets stellt das Antennensteuergerät 40 fest, ob die
Paketadresse mit der Adresse des Antennensteuergeräts übereinstimmt.
Wenn keine Übereinstimmung
vorliegt, setzt das Antennensteuergerät 40 die Überwachung
nach weiteren Befehlen fort. Wenn die Adresse mit der Adresse des
Antennensteuergeräts 40 übereinstimmt,
dann liest das Steuergerät 40 den
dazugehörigen
Befehl Change_Tilt. Das Mikroprozessor-Steuergerät 401 liest anschließend die
Antennenposition aus seinem dazugehörigen Speicher 402.
Das Mikroprozessor-Steuergerät 401 bestimmt
anschließend
die Differenz zwischen der derzeitigen Position der Antenne und
der nachjustierten Position. Es sendet anschließend einen Befehl an den Motorantrieb 202,
um die Abwärtsneigung
der Antenne nachzujustieren. Nachdem der Motorantrieb 202 die
Antenne nachjustiert hat, liest das Mikroprozessor-Steuergerät 401 die
Antennenposition vom Sensor 30. Das Mikroprozessor-Steuergerät schreibt
anschließend
die Position in seinen dazugehörigen
Speicher 402.
-
Wenn
die Antennenposition mit der erwarteten Antennenposition übereinstimmt,
sendet das Antennensteuergerät 40 die
Position Ant_Location, gebündelt
mit der Antennenadresse Ant_Address, an das Hauptsteuergerät. Wenn
die Position jedoch nicht übereinstimmt,
sendet das Antennensteuergerät 40 eine
Nachricht Send_Fault1 an das Hauptsteuergerät 50, gebündelt mit
der Antennenadresse Ant Address, wobei angegeben wird, dass das
Antennensteuergerät 40 nicht
in der Lage war, die gewünschte
Position zu bestimmen. Wenn der Motorantrieb 202 nicht
antwortet, sendet das Steuergerät
zusätzlich
eine Nachricht Send_Fault2 an das Hauptsteuergerät 50, gebündelt mit
der Steuergerätadresse,
wobei angegeben wird, dass der Antrieb/Motor 202 nicht
antwortet. Auf diese Weise kann das Antennensteuergerät 40 das
Hauptsteuergerät 50 warnen, wenn
Probleme bei der Einstellung der Position auftreten, und das Hauptsteuergerät 50 kann
feststellen, welches Problem vorliegt.
-
Zusätzlich kann
das Hauptsteuergerät 50 die
Antennensteuergeräte 40 abfragen,
indem ein Befehl Check_Address gesendet wird. Jedes Antennensteuergerät würde darauf
mit seiner Adresse als Nachricht antworten. Auf diese Weise kann
das Hauptsteuergerät
feststellen, ob Kommunikationsprobleme mit einem bestimmten Steuergerät oder der
Kommunikationsleitung vorliegen, wie weiter unten genauer erklärt. Ein Fachmann
wird zu würdigen
wissen, dass diese Befehlsprotokolle und Verfahren nur als Beispiel
dienen und dass andere Verfahren, Befehle und Nachrichten für die Kommunikation
zwischen dem Hauptsteuergerät
und den Antennensteuergeräten
verwendet werden könnten,
ohne von der Erfindung abzuweichen.
-
Benutzerschnittstelle
-
Die
Benutzerschnittstellen 504 oder 60 können zur
Steuerung der Position der Antennen durch einen Techniker oder andere
Personen verwendet werden, indem das Hauptsteuergerät entsprechend
bedient wird. Während
der ersten Einrichtung des Systems würde ein Techniker zum Beispiel
Passwörter
für jede
Basisstation, die Adressen für
die Turmantennen, die Telefonnummer des Remote-Computers und die
Steuergerät-ID eingeben,
wie in 6 dargestellt. Nachdem das System eingerichtet
ist, kann der Benutzer anschließend
die Abwärtsneigung
jeder Antenne einstellen, die anschließend im Hauptsteuergerät gespeichert
wird. Nach einer bevorzugten Ausführungsform kann der Remote-Computer 60 ein
Laptop-Computer sein. Nach dieser Ausführungsform würde ein
Benutzer die Modemschnittstelle 505 aufrufen, die dem gewünschten
Turm oder der Basisstation zugeordnet ist. Der Benutzer würde anschließend über die
Modemschnittstelle und die serielle Schnittstelle 503 mit
dem Mikroprozessor-Steuergerät 501 verbunden.
Sobald die Verbindung besteht, bauen das Mikroprozessor-Steuergerät 501 und
der Computer 60 des Benutzers eine Kommunikation unter
Verwendung von Handshake-Protokollen
auf, wie dem Fachmann bekannt. Nachdem die Kommunikation aufgebaut ist,
kann das Mikroprozessor-Steuergerät 501 Sicherheitsprüfungen ausführen, um
die Identität
des Benutzers festzustellen. Zum Beispiel könnte die Seriennummer des Mikroprozessor-Steuergerätes 501 vom
Hauptsteuergerät
gelesen und mit einer Benutzer-Seriennummer zur Identifizierung
und Überprüfung des
Benutzers verglichen werden.
-
Nachdem
die Kommunikation aufgebaut wurde, kann der Benutzer über den
Remote-Computer 60 die Antennenpositionen aus dem Speicher 502 des
Steuergeräts
lesen, damit sie auf der graphischen Benutzeroberfläche angezeigt
werden. Um die Antennen zu positionieren, gibt der Benutzer die
gewünschten Antennenpositionen über die
grafische Benutzeroberfläche
ein, welche die Befehle an das Haupt-Mikroprozessorsteuergerät 501 überträgt. Das
Haupt-Mikroprozessorsteuergerät 501 würde anschließend die
Position unter Verwendung des oben erklärten Befehlsprotokolls nachjustieren.
Nach dem Nachjustieren oder Lesen der Antennenpositionen würde das
Haupt-Mikroprozessorsteuergerät 501 zurück an den
Benutzer 50 bestätigen,
ob die Positionierung erfolgreich war. Das Haupt-Mikroprozessorsteuergerät 50 würde zum
Beispiel antworten: "I
set Antenna_N to tilt_T" (Ich
habe Antenne N auf Neigung T eingestellt) oder "I could not set because of Fault_F" (Einstellung nicht
möglich
wegen Fehler F).
-
Der
entfernte Benutzer könnte
anschließend
mit der Justierung anderer Antennenpositionen fortfahren, indem
er neue Antennenpositionen eingibt. Infolgedessen könnten die
Antennenpositionen einfach von einem Benutzer an einem von der Basisstation
entfernten Ort gelesen und geändert
werden. Zum Beispiel könnte
nach den Ausführungsformen
der Erfindung ein Techniker über
ein Mobiltelefon oder einen Laptop-Computer auf die Basisstation
zugreifen. Dies würde
dem Techniker zum Beispiel die Möglichkeit
geben, durch einen Versorgungsbereich zu fahren und Messungen der
Strahlungsausbreitung von den einzelnen Antennen der Basisstationen
vorzunehmen. Aufgrund der Messungen wäre der Techniker anschließend in
der Lage, die Antenne so zu justieren, dass die von der Basisstation
bereitgestellte Funkversorgung optimiert wird. Dies ist eine bedeutende
Verbesserung gegenüber
früheren
Verfahren zum Justieren der Antennen von Basisstationen, insbesondere
wenn neue Basisstationen hinzugefügt werden oder während Neukonfigurierungen des
Systems, wenn normalerweise mehrere Justierungen notwendig sind,
um die gewünschte
optimale Funkversorgung herzustellen. Zusätzlich können mehrfache Antennenpositionen
im Speicher in der Basisstation für einen bestimmten Zellenstandort
gespeichert werden, um sie zu einem späteren Zeitpunkt wieder abzurufen. Dies
ermöglicht
eine einfache Justierung zwischen Strahlungsdiagrammen.
-
Die
entfernte Benutzerschnittstelle 60 ermöglicht auch, die Positionierung
der Antenne zu testen. Wenn zum Beispiel das Hauptsteuergerät 50 Nachrichten
an Antennensteuergeräte 40 sendet
und keine Antwort empfängt,
kann festgestellt werden, dass möglicherweise
ein Problem mit dem Kommunikationskabel 41 vorliegt. Zusätzlich kann
jedes der Antennensteuergeräte 40 abgefragt
werden. Wenn ein Antennensteuergerät 40 nicht antwortet,
dann wird festgestellt, dass ein Problem mit dem einzelnen Antennensteuergerät 40 vorliegt.
Wenn sich schließlich
die Antenne 10 verklemmt, kann das Antennensteuergerät 40 eine
Nachricht an das Hauptsteuergerät 50 senden,
in der angegeben wird, dass das Antennensteuergerät 40 einen
Versuch zur Justierung der Position unternommen hat, dass sich das
Räderwerk
jedoch nicht bewegt hat oder der Motor nicht gestartet ist.
-
Sobald
der Benutzer eine Schnittstellenverbindung zu einem bestimmten Zellenstandort
hergestellt hat, kann der Benutzer anschließend eine Systemprüfung anfordern,
eine Änderung
der Neigungseinstellung für
eine bestimmte Antenne anfordern oder eine Änderung der Neigungseinstellung
an jeder einzelnen Antenne anfordern, die von einer geänderten
Gruppe betroffen ist.
-
System-Check
-
Bezugnehmend
auf die 7A–B wird nun die Durchführung einer
Systemprüfung
beschrieben. Bezugnehmend auf die in 7A dargestellte
beispielhafte Ausführungsform
stellt ein Benutzer eine Schnittstellenverbindung zu einem bestimmten
Zellenstandort 701 her, zum Beispiel über eine Modemverbindung unter Verwendung
eines Personal Computers oder eines Laptop-Computers. Sobald er
mit dem Zellenstandort verbunden ist, kann der Benutzer mehrere
verschiedene Funktionen ausführen.
Eine mögliche
Funktion besteht in der Anforderung einer Systemprüfung 703,
um die aktuelle Einstellung jeder Antenne abzurufen und sie mit früheren Einstellungen
zu vergleichen. Um eine Systemprüfung
durchzuführen,
sendet die grafische Benutzeroberfläche 60 unter der Kontrolle
des Benutzers einen Befehl zur Ausführung einer Systemprüfung an
das Hauptsteuergerät 50.
-
Nachdem
eine Systemprüfung 703 angefordert
wurde, sendet das Hauptsteuergerät 50 einen
Befehl Antenna_Check 705, kombiniert mit der Adresse eines
Antennensteuergeräts
Ant_Address. Das Hauptsteuergerät 50 wartet
anschließend
auf eine Antwort von dem Antennensteuergerät 40 mit der angeforderten
Einstellung 707. Wenn das Antennensteuergerät 40 nicht
antwortet, unternimmt das Hauptsteuergerät 50 mehrere weitere
Versuche, die angeforderte Information zu bekommen, indem es den
Befehl erneut an das Antennensteuergerät 40 sendet. Wenn
das Antennensteuergerät 40 nach
3 Versuchen nicht antwortet 713, hält das Hauptsteuergerät fest,
welche Antennenadresse nicht geantwortet hat 722.
-
Wenn
das Antennensteuergerät 40 geantwortet
hat, stellt das Hauptsteuergerät 50 anschließend fest, ob
der Befehl vom Antennensteuergerät 40 verstanden
wurde 709. Wenn der Befehl vom Antennensteuergerät 40 nicht
verstanden wurde, sendet das Hauptsteuergerät 50 den Befehl erneut,
zum Beispiel bis zu drei Mal 719. Wenn das Antennensteuergerät 40 nach
3 Versuchen nicht antwortet, hält
das Hauptsteuergerät 50 fest, welches
Antennensteuergerät 40 den
Befehl nicht verstanden hat und welcher Befehl es war 720.
-
Wenn
das Antennensteuergerät 40 den
Befehl erkennt, dann antwortet das Antennensteuergerät 40 mit
der Position der Antenne Ant_Location und der Adresse der Antenne
Ant_Address. Das Hauptsteuergerät 50 stellt
danach fest, ob alle Antennen abgefragt wurden 715. Wenn
nicht, stellt das Hauptsteuergerät 50 anschließend fest,
ob bei dem Versuch zum Lesen der Antennenposition ein Fehler aufgetreten
ist 716, zum Beispiel, dass die Antenne nicht geantwortet
hat oder den Befehl nicht erkannt hat. Wenn keine Fehler aufgetreten sind,
fragt das Hauptsteuergerät 50 ab,
ob der Benutzer noch weitere Adressen lesen möchte 718. Wenn ja, könnte die
Systemprüfung
so konfiguriert werden, dass alle Antennenpositionen gelesen werden,
und in diesem Fall würde
sie automatisch die Position der nächsten Antenne anfordern. Wenn
das Hauptsteuergerät 50 feststellt,
dass ein Fehler aufgetreten ist, versucht das Hauptsteuergerät 50,
die Position der nächsten
Antenne zu prüfen 705,
wie oben beschrieben.
-
Sobald
alle Antennen 10 überprüft wurden
oder wenn der Benutzer keine weiteren Antennen 10 prüfen möchte, stellt
das Hauptsteuergerät 50 anschließend fest,
ob eines der Antennensteuergeräte 40 nicht
geantwortet hat 731. Wenn eines der Antennensteuergeräte 40 nicht
geantwortet hat, stellt das Hauptsteuergerät 50 anschließend fest,
ob alle Antennensteuergeräte 40 nicht
geantwortet haben 741 (7B). Falls
dies der Fall sein sollte, stellt das Hauptsteuergerät 50 anschließend fest,
dass ein Systemfehler vorlag und dass die Kommunikation mit den
Antennen steuergeräten
nicht aufgebaut worden war 743. Wenn jedoch nur bestimmte
Antennensteuergeräte 40 nicht
geantwortet haben, dann hält
das Hauptsteuergerät 50 fest,
welche dies sind, und meldet die von dem Problem betroffenen Steuergeräte 745.
-
Wenn
alle Antennensteuergeräte 40 antworten,
stellt das Hauptsteuergerät 50 anschließend fest,
ob eines der Antennensteuergeräte 40 den
Befehl zum Melden der Position der Antenne nicht erkannt hat 733. Falls
dies der Fall sein sollte, stellt das Hauptsteuergerät 50 anschließend fest,
ob alle Antennensteuergeräte 40 ihre
Positionen nicht gemeldet haben 735. Wenn sie es nicht
getan haben, meldet das Hauptsteuergerät 50 an die grafische
Benutzeroberfläche,
dass ein Systemfehler vorgelegen hat und welcher Befehl nicht erkannt wurde 743.
Wenn nur bestimmte Antennensteuergeräte 40 den Befehl nicht
verstanden haben, dann meldet das Hauptsteuergerät 50 an den Benutzer,
welche Antennensteuergeräte 40 nicht
in der Lage waren, die Befehle zu erkennen 737.
-
Ändern der
Neigungseinstellung
-
Bezugnehmend
auf die 8A–B wird nun ein beispielhaftes
Verfahren zur Durchführung
einer Änderung
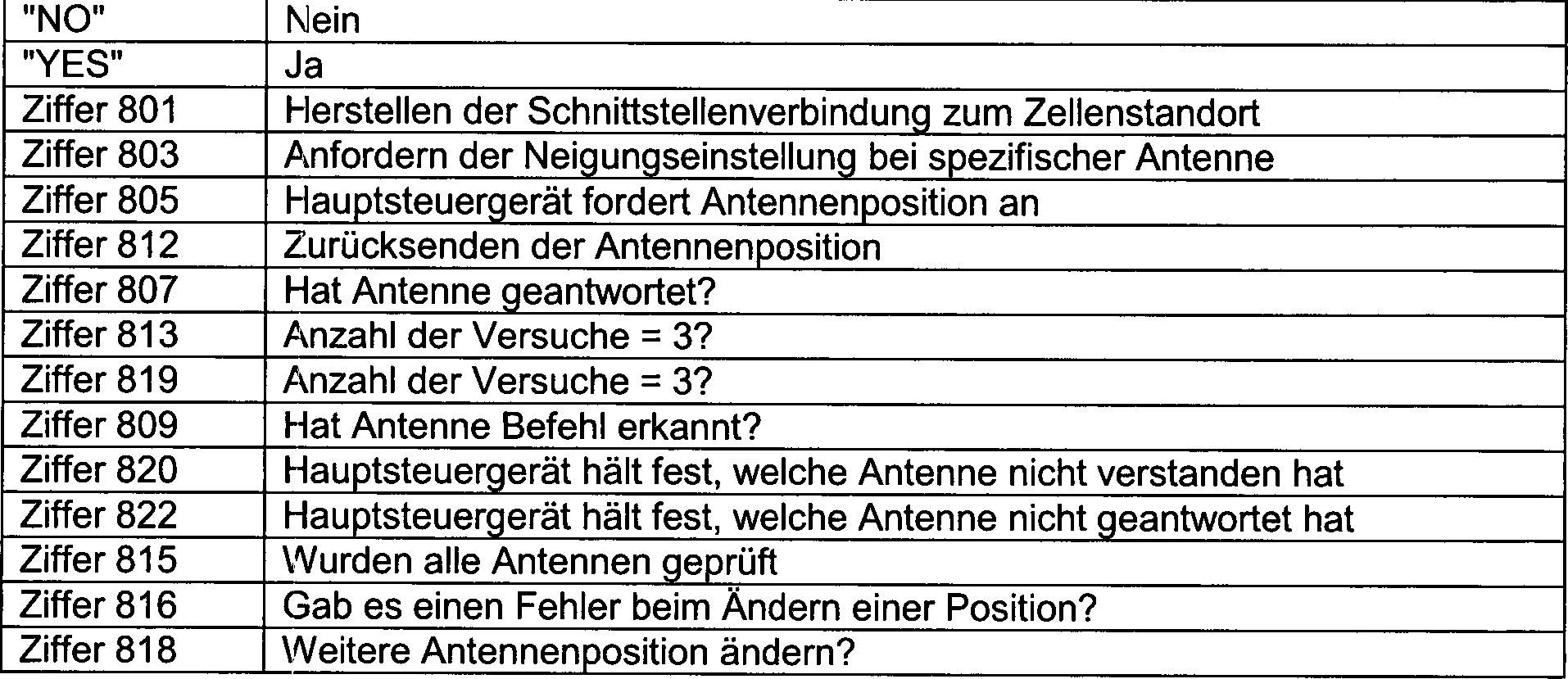
der Neigungseinstellung beschrieben. Bezugnehmend auf die in 8A dargestellte
beispielhafte Ausführungsform
stellt ein Benutzer, wie zuvor beschrieben, eine Schnittstellenverbindung
zu einem bestimmten Zellenstandort her 801, zum Beispiel über eine
Modemverbindung unter Verwendung eines Personal Computers oder eines
Laptop-Computers. Um eine Änderung
der Neigungseinstellung durchzuführen,
sendet die grafische Benutzeroberfläche 60 unter der Kontrolle
des Benutzers einen Befehl zur Ausführung einer Änderung
der Neigungseinstellung an das Hauptsteuergerät 50.
-
Nachdem
eine Änderung
der Neigungseinstellung 803 angefordert wurde, sendet das
Hauptsteuergerät 50 einen
Befehl Change_Tilt 805, kombiniert mit der Adresse eines
Antennensteuergeräts
Ant_Address. Das Hauptsteuergerät 50 wartet
anschließend
auf eine Antwort vom Antennensteuergerät 40 über die
Einstellung 807.
-
Wenn
das Antennensteuergerät 40 den
Befehl erkennt, dann antwortet das Antennensteuergerät 40 mit
der neuen Position der Antenne Ant_Location und der Adresse der
Antenne Ant_Address. Wenn ein Problem vorgelegen hat und das Antennensteuergerät 40 nicht
zur Positionierung der Antenne in der Lage war, sendet das Antennensteuergerät 40 wie
zuvor beschrieben eine Fehlermeldung an das Hauptsteuergerät 50.
-
Wenn
das Antennensteuergerät 40 nicht
antwortet, unternimmt das Hauptsteuergerät 50 mehrere weitere
Versuche, die Neigung der Antenne zu justieren, indem der Befehl
erneut an das Antennensteuergerät 40 gesendet
wird. Wenn das Antennensteuergerät 40 nach
3 Versuchen nicht antwortet 813, hält das Hauptsteuergerät fest,
welche Antennenadresse nicht geantwortet hat 822.
-
Wenn
das Antennensteuergerät 40 geantwortet
hatte, stellt das Hauptsteuergerät 50 anschließend fest,
ob der Befehl vom Antennensteuergerät 40 verstanden wurde 809.
Wenn der Befehl vom Antennensteuergerät 40 nicht verstanden
wurde, sendet das Hauptsteuergerät 50 den
Befehl beispielsweise bis zu drei Mal erneut 819. Wenn
das Antennensteuergerät 40 nach
3 Versuchen nicht antwortet, hält
das Hauptsteuergerät 50 fest,
welches Antennensteuergerät 40 den
Befehl nicht verstanden hat und welcher Befehl es war 820.
-
Das
Hauptsteuergerät 50 stellt
anschließend
fest, ob alle Antennen geändert
wurden 815. Wenn nicht, stellt das Hauptsteuergerät 50 anschließend fest,
ob bei dem Versuch zur Änderung
der Antennenposition ein Fehler aufgetreten ist 816, zum
Beispiel, dass das Antennensteuergerät 40 nicht geantwortet
hat oder den Befehl nicht erkannt hat. Wenn keine Fehler aufgetreten
sind, fragt das Hauptsteuergerät 50 ab,
ob der Benutzer noch weitere Adressen ändern möchte 818. Wenn das
Hauptsteuergerät 50 nicht
feststellt, dass ein Fehler aufgetreten ist, versucht das Hauptsteuergerät 50,
einen Befehl mit einem weiteren Antennensteuergerät 805 auszuführen.
-
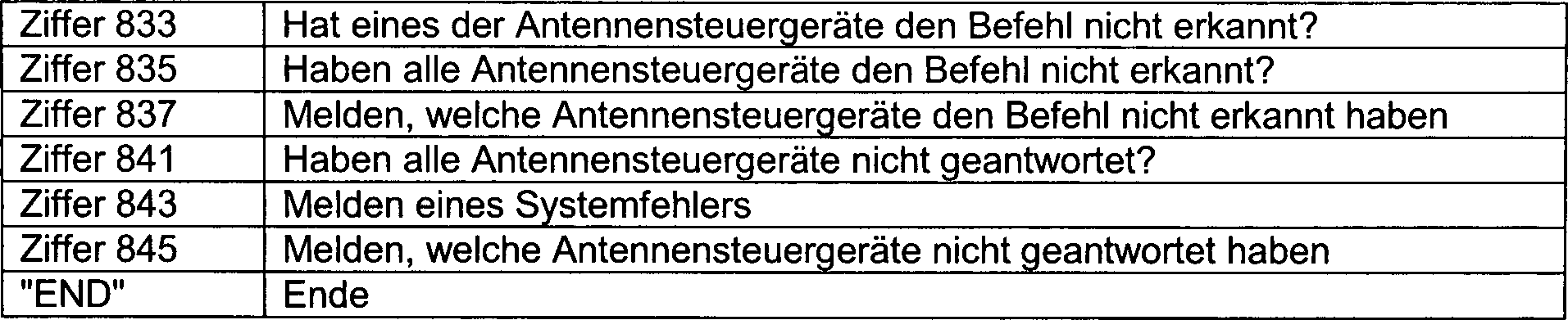
Sobald
alle Antennen 10 geändert
wurden, oder wenn der Benutzer die Position keiner weiteren Antenne ändern möchte, dann
stellt das Hauptsteuergerät 50 anschließend fest,
ob eines der Antennensteuergeräte 40 nicht
geantwortet hat 831.
-
Wenn
eines der Antennensteuergeräte 40 nicht
geantwortet hat, stellt das Hauptsteuergerät 50 anschließend fest,
ob alle Antennensteuergeräte 40 nicht
geantwortet haben 841. Falls dies der Fall sein sollte, stellt
das Hauptsteuergerät 50 fest,
dass ein Systemfehler aufgetreten ist und dass die Kommunikation
mit den Antennensteuergeräten
nicht aufgebaut wurde 843. Wenn jedoch nur bestimmte Antennensteuergeräte 40 nicht
geantwortet haben, dann hält
das Hauptsteuergerät 50 fest,
welche dies waren, und meldet die von dem Problem betroffenen Steuergeräte 845.
-
Wenn
alle Antennensteuergeräte 40 geantwortet
haben, stellt das Hauptsteuergerät 50 anschließend fest,
ob eines der Antennensteuergeräte 40 den
Befehl zur Änderung
der Position der Antenne nicht erkannt hat 833. Falls dies
der Fall sein sollte, stellt das Hauptsteuergerät 50 anschließend fest,
ob alle Antennensteuergeräte 40 nicht
in der Lage waren, die Befehle zu erkennen 835. Wenn sie
sie nicht erkannt haben, meldet das Hauptsteuergerät 50 an
die grafische Benutzeroberfläche,
dass ein Systemfehler aufgetreten ist und welche Befehle nicht erkannt
wurden 843. Wenn nur bestimmte Antennensteuergeräte 40 den
Befehl nicht verstanden haben, dann meldet das Hauptsteuergerät 50 an
den Benutzer, welche Antennensteuergeräte 40 nicht zur Erkennung
der Befehle in der Lage waren 837. Wenn im Zusammenhang
mit den Antennensteuergeräten 40 Fehler
vorgelegen haben, meldet das Hauptsteuergerät 50, welche Fehler
aufgetreten sind.
-
Die
vorliegende Erfindung ist in Form eines Beispiels beschrieben worden,
und Änderungen
und Varianten der beispielhaften Ausführungsformen werden sich den
Fachleuten auf diesem Gebiet anbieten, ohne vom Geist der Erfindung
abzuweichen. Die bevorzugten Ausführungsformen dienen lediglich
der Veranschaulichung und sollten in keiner Weise als einschränkend betrachtet
werden. Der Gültigkeitsbereich
der Erfindung ist anhand der beigefügten Ansprüche statt anhand der vorstehenden
Beschreibung zu ermessen, und alle Varianten und gleichwertigen
Entsprechungen, die innerhalb des Bereichs der Ansprüche fallen,
gelten als darin enthalten.
-
Legende zu den Zeichnungen
-
-
-
-
-
-
-
-
-
-
-